
さまざまなタイプの運転支援システムや自動運転システムの試験においては、車両,搭乗者および歩行者の安全確保が重要です。 弊社は Velodyne社のLidarセンサ用プラグインを開発することで、Velodyne Lidarセンサのデータとアナログ信号,ビデオ画像,CANなどの車両インタフェースとの同期計測のシステム構築を可能にしました。

先進運転支援システム(ADAS)と自動運転車(AV, AD)を搭載した車両を開発している企業は、次のような特定のテストをしています。
このようなテストをする場合、各メーカーは通常はもちろん危険な状況でも、安全システムが最適に機能していることを確認するために、高精度かつ迅速な反応が可能な検証機器を必要とします。
このような場合、LIDAR(Light Detection and Ranging)システムを使用してオブジェクトを検出し、それらの距離をマッピングします。LIDARは、これらの距離をリアルタイムで計測できます。センサはレーザー光を放出し、光が物体や表面に当たってセンサに反射するのにかかる時間を測定します。その後、オブジェクトの3D表現を作成します。
多くの場合、Lidarセンサはレーダーやカメラなどの他のセンサと一緒に使用されます。LIDARデータは通常、他のタイプのセンサやデータソース(アナログセンサ、CANバスなど)からのデータと一緒に収録する必要があります。メーカーにとっての課題は、さまざまなデータソースから収録したすべてのデータの品質を同期して最適化することです。
非互換性、または同期の問題による誤解を招く可能性のある結果を回避するための最適な方法は、すべてのデータソースの同期計測を提供できるDAQソリューションを使用することです。 弊社システムは車両インタフェース(CAN,CAN-FD,LINなど)やSENT信号、アナログデータ,GPS,ジャイロセンサ,動画を同時に測定できるためデータの相関解析に貢献できます。
自動運転車に必要な計測の要件を満たす、シンプルでパワフルなDewesoftX Velodyne Lidarプラグインは、Velodyne Lidarからのデータを、DewesoftXで他の収録データと同期させます。
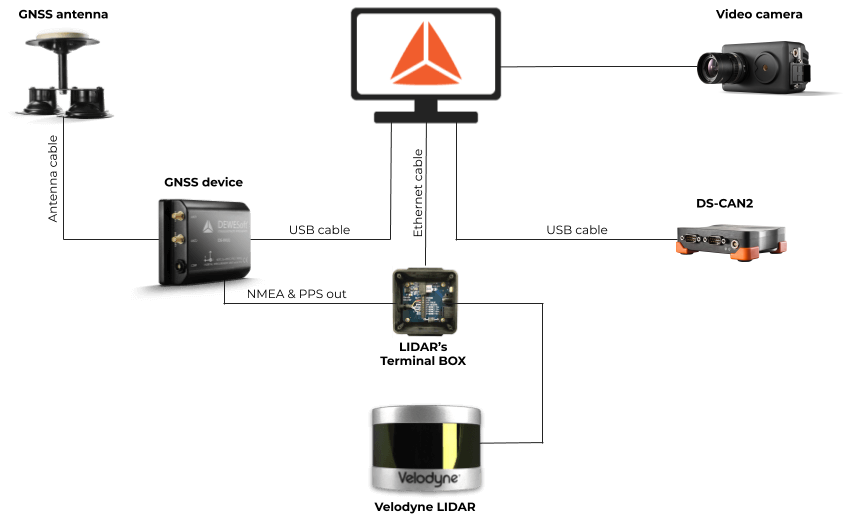
Velodyne Lidarは、GPS PPS信号に同期した他のGNSSデバイス(DS-IMU、DS-VGPS-HSなど)と一緒に使用され、GNSS受信機はLIDARセンサのNMEA GNSSメッセージのソースとなります。Velodyne LidarのPPS同期を得るためには、GNSSデバイスに物理的に接続し、DewesoftXで適切に選択する必要があります。
Velodyne Lidarは、DewesoftXでも利用可能なNMEA GNSSメッセージとGPS PPS信号で同期しています。
慣性計測ユニット「DS-IMU」は、以下のような複数のセンサを組み合わせています。
DS-IMUは、GPS PPS信号を介してVelodyne Lidarとの接続および同期に対応しています。
DS-IMUは、ソフトウェア同期設定で接続することもできます。Lidarのステータスや回転数の設定は、DewesoftX内で直接行います。
Velodyne Lidarセンサからは、ポイントの距離と強度という2つの主なチャネルを利用できます。点群の視覚化は、地図表示ウィジェットによって処理され、開いている道路地図や衛星画像レイヤが点群に重ねられます。すべての地図レイヤはDewesoftX内でダウンロードでき、計測現場で実際にインターネットに接続されていない場合は、オフラインモードで再利用できます。また、地図レイヤと同様に、任意の地図をインポートすることもできます。
データ収録ソフトウェアDewesoftXを使用して、DAQシステムは以下のようなデータを組み合わせます。
・Velodyne Lidar センサデータ
・車両のCANバスデータ
・GNSSデータと方向性
・制動距離の計算
・走行ロボットのデータ
・ビデオカメラ

計測セットアップの目的は、以下のテストをすることです。
・DewesoftX内のLidarデータの応答性
・CAN,GPS,ビデオなどの他のデータソースとの同期互換性
・Velodyne Lidar,DS-IMU2,および乗用車のCANバスデータを取得するためのDAQセットアップが容易さ
運転中の周囲の状況をよりよく確認するために、データ収録システムにビデオカメラを追加しました。Dewesoft社のDAQシステムに無料で追加できるデータファイルを解析する際に、非常に便利な機能です。
■データ収録システム
・Velodyne VLP-16 Lidar
・DS-IMU2デバイス - GPS/GLONASSをサポートし、RTKオプションで2cmの位置精度を持つ慣性測定ユニットとGNSSレシーバ
・ビデオカメラ
・DS-CAN2 - 車両OBD-IIまたはSAE J1939データ収集のための2チャネルUSB CANインタフェース
■ソフトウェア
・データ収録集ソフトDewesoftX
・Velodyne Lidarモジュール(回転速度1,200 RPM)
DewesoftXのビジュアル表示では、周囲の環境をきれいにプレビューすることができます。Lidarの視覚化には、通常、地図ウィジェットを使用しています。これはLidarデータのシームレスな視覚化を提供するもので、カラーリングはレーザー強度を表し、視覚化されたラインは異なるオブジェクトのレーザーポイントを表します。2つのMapウィジェットを使って以下を表示しました。
・左の地図:速度カラースケールを使用したDS-IMU2デバイスからのポジショニングとトラックビュー
・右の地図:LIDAR強度カラーリングが適用されたLIDARポイントクラウドの視覚化
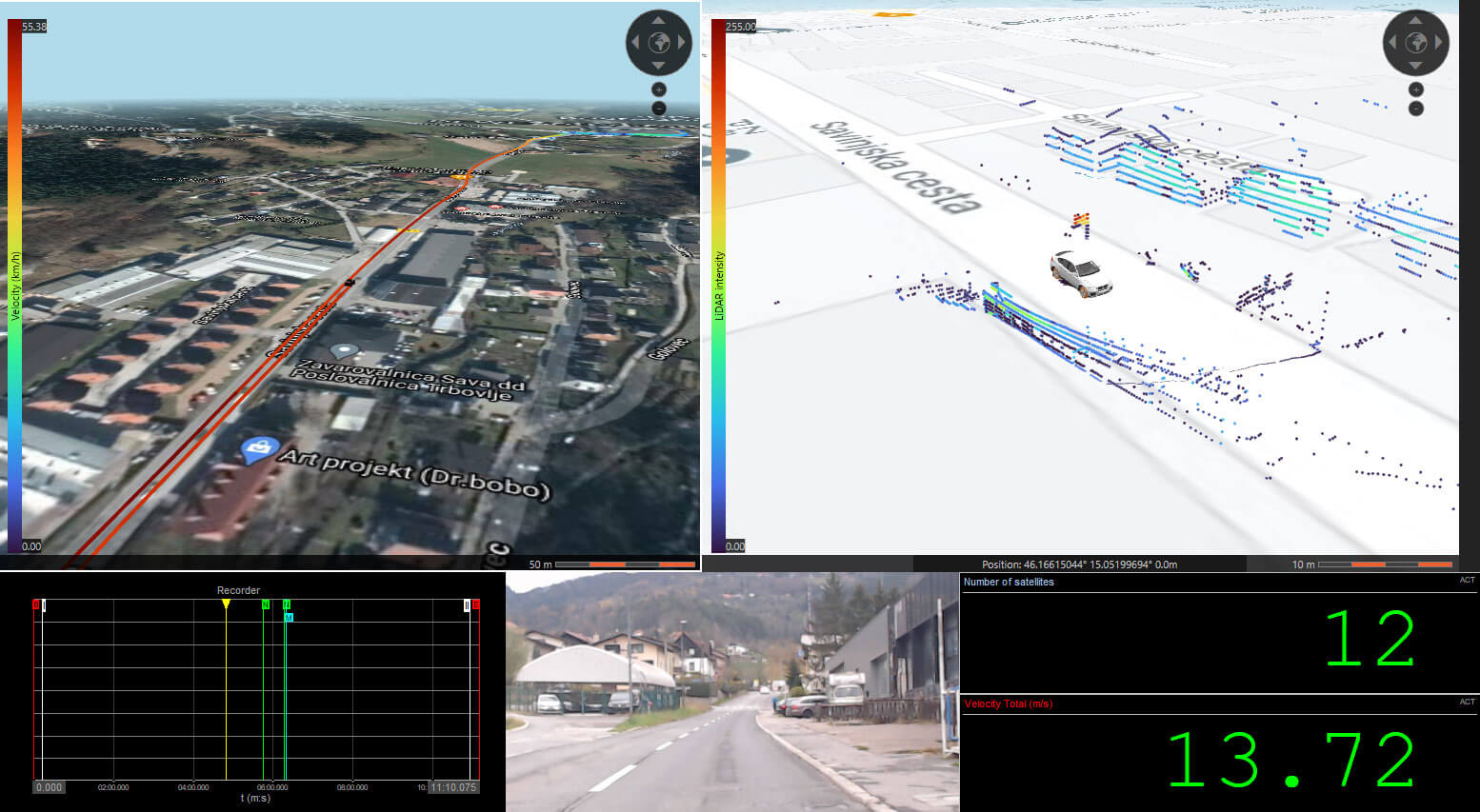
LIDAR強度とは、主に距離とターゲットの反射率に影響される、収録されたレーザー強度の戻り値(戻り電力/放出電力)を意味します。一方、LIDAR距離は、デフォルトのLIDAR位置からの実際の距離として視覚的に適用されます。
LIDAR距離データは、各LIDARレーザーのポイントデータのマトリックスとして出力されます。 さらに、車両にフィードバックを与えたり、車両と周囲の物体との距離関係の解析に使用できます。 交通シーンの分類,オブジェクトの検出と識別などに使用されます。
このアプリケーションでは、LIDARセンサの1,200 RPMの回転速度を使用しました。 強度と距離のLidarデータの収録は、DewesoftXソフトウェア内で非常に応答性が高いことを視覚的に示しました。 DS-IMU2からのLidarおよびGNSSデータは、収録した各サンプルに同期されます。これにより、全体的な同期の互換性が証明されます。
さらに、ビデオカメラ・ウィジェットにリンクされたシンプルなウェブカメラを使用して、運転環境の同期されたカメラ画像を表示しています。レコーダーウィジェットは、任意の計測データチャネルを表示するために使用します。ここでは、現在の走行速度と、GNSS受信機から見えるGNSS衛星の数を示す2つのデジタルレコーダを使用しました。
すべてのパラメータは、この画面では適用されていないものも含めて、DewesoftXのデータファイル内に保存されます。これらのパラメータは、解析画面に追加したり、さまざまな形式でエクスポートして、さらなる開発のための計算やシミュレーションが可能です。
Lidarセンサは、自律走行車の開発段階や実使用において重要な役割を果たしています。ADASのテストだけでなく、自動車以外のアプリケーションにも重要です。Lidarセンサを使用する企業の数は急速に増加しています。そのためLidarパラメータの収録とテスト、およびそれらの全体的な同期が非常に重要です。
DewesoftXはVelodyne LidarプラグインによるLidar計測に対応しました。さまざまなセンサやデータを、1つの設定で組み合わせ、同期させ、視覚化できます。
〒331-0814 さいたま市北区東大成町1-497 MJ赤柴ビル6階
copyright© DEWE Japan Co.,Ltd. all rights reserved.
