
はじめに
EtherCATは、"Ethernet for Control Automation Technology "の略です。Ethernetのパワーと柔軟性を制御の世界にもたらすプロトコルです。
- 産業用オートメーション
- 運動制御
- リアルタイム制御システム
- データ収録システム
EtherCATプロトコルはEtherCAT Technology Groupによって管理され、IEC 61158で標準化されています。
 EtherCATおよびEtherCATのロゴは、Beckhoff Automation GmbH(ドイツ)のライセンスに基づく
EtherCATおよびEtherCATのロゴは、Beckhoff Automation GmbH(ドイツ)のライセンスに基づく
商標または登録商標です。
ここではEthernetの実用性と人気を理解するために、Ethernet自体を見てみましょう。
そうすればEtherCATを理解することができます。
Ethernetの歴史
1970年代に米国ゼロックス社のパロアルト研究所(PARC)で開発されたEthernetは、低コストで耐障害性に優れた、ローカルおよび広域ネットワーク用のネットワークインタフェースとして設計されました。Ethernetが開発された当時は、TokenBus,TokenRing,ARCNET,CDDIなどのネットワークや、あまり知られていない独自のネットワークインタフェースが存在していました。
 旧PARC(Palo Alto Research Center)の施設サイン
旧PARC(Palo Alto Research Center)の施設サイン
Mike Knell / CC BY-SA (https://creativecommons.org/licenses/by-sa/2.0)
PARCの科学者であるRobert Metcalfは、ゼロックス社によって最近発明された世界初のレーザプリンタを共有できるように、会社の数百台のコンピュータを相互接続する方法を考えるように命じられました。
今となっては些細な問題に思えるかもしれませんが、1970年代初頭には、2~3台以上のコンピュータを持っている企業はほとんどありませんでした。パソコン,ノートブック,携帯電話,タブレットなどもありませんでした。既存のネットワークでは、これほど多くのマシンを接続するための拡張性や速度が不足していたため、Metcalfたちはこの問題を解決するための新たなアプローチを必要としていました。
彼らはインターネットの技術と自分たちのアイデアを組み合わせて、現在世界中のあらゆる場所で、何百万もの機器が互いに接続され、インターネットそのものにつながるネットワークを誕生させたのです。
1985年に正式に発行されたIEEE-802.3により、Ethernetは大小のネットワーク、さらには個々の機器の事実上標準のインタフェースになりました。Ethernetは、耐障害性とスピードを重視して開発されたハードウェアとソフトウェアの組み合わせです。
情報はデータグラムと呼ばれる「パケット」または「フレーム」に分割されます。データグラムには、データだけでなく、受信側で再構成できるように識別用のヘッダやアドレス情報が含まれており、最後にはエラーを防ぐために32ビットのCRC(巡回冗長検査)が施されています。
ネットワーク上の機器にはEthernetインタフェースがあり、それぞれに固有のアドレスが設定されています。これは重要なことで、多くの機器が同じネットワーク上で送受信を行う可能性があるため、各機器はどのデータが自分に向けられたものかを知る必要があります。
Ethernetプロトコルによるデータ送信の仕組み
郵便局からの何百通もの手紙や荷物が通りを流れていくのを想像してみてください。そのほとんどは近所の人に宛てたもので、そのうちのいくつかはあなたに宛てたものです。どの手紙でしょう?手紙の表面には住所が印刷されているので、あなたの宛の手紙は迷わずあなたの郵便受けに入れられます。
 Sakurambo / CC BY-SA (http://creativecommons.org/licenses/by-sa/3.0/)
Sakurambo / CC BY-SA (http://creativecommons.org/licenses/by-sa/3.0/)
簡単ですよね? 何百年も前からこのように機能してきました - コンピュータよりずっと前に。
しかし、通りを流れてくるそれぞれの手紙が、実際には何千,何百万もの小さなピースに切り分けられていて、それぞれのピースがその手紙の中の1つの単語であると想像してみてください。
しかも、これらの単語は必ずしも順番に並んでいません。それどころか、隣人の手紙に書かれた何十億もの単語も混ざっているのです。急に複雑になりましたね。
Ethernetでは、それぞれの「単語」(データグラム)に、郵便受けが意図された単語をつかみ取り、それらを完全に組み立て直してあなた宛ての手紙にするための、必要な情報が含まれています。そのため、あなたが郵便受けを開けると、手紙は完全に組み直されていて投函された時と同じ状態になっています。
Ethernetがどのように機能するかについて深く考える必要はありませんが、このインタフェースの性質を理解し、なぜ今日これほどまでに普及しているのかを理解することは重要です。
EtherCATの歴史について
EtherCATはもともと、産業オートメーションおよびリアルタイム制御システムで使用されるPLC(Programmable Logic Controller)の大手メーカーであるBeckhoff Automationによって開発されました。
彼らは1980年代後半に、他のインタフェースの帯域幅の問題を解決するために、「LightBus」という独自のフィールドバスを開発しました。このプロトコルをさらに改良してEtherCATが開発されました。
BeckhoffがEtherCATを世界に紹介したのは2003年のことです。そして2004年にはETG(EtherCAT Technology Group)に権利を譲渡し、ETGはこの規格の普及に努めています。ETGには、非常に活発な開発者およびユーザーグループがあります。EtherCATはIEC 61158で標準化されています。
なぜEtherCATなのか?
なぜ、DAQと制御システムの相互接続にEthernetを使用することができないのでしょうか?Ethernetは高速です。安価です。そして現在のコンピュータベースの機器に簡単に実装できます。では、何が足りないのでしょうか?
答えは、主に決定論や時間の正確さにあります。先ほどの架空の郵便受けは、あなたの手紙からすべてのデータグラムを収集し、それらを組み立て直すのに必要な時間が充分あります。
100通の手紙しか来ない日には、あなたの郵便物はすぐにあなたの郵便受けに現れます。郵便物が多い日には多少時間がかかりますが、たいしたことはありませんよね?
ですから、オフィス内での書類のやりとりや、あるデバイスから別のデバイスへの送信には、Ethernetでまったく問題ありません。手紙が10:00:02.123111に届いたのか、10:01に届いたのかは重要ではありません。この用途では正確な時間は重要ではないのです。
 画像:PixabayのMuhammad Ribkhan
画像:PixabayのMuhammad Ribkhan
しかし、制御システムはタイミングが命です。何かが起こった時に、できるだけ時間軸に沿った分解能と精度を確保することが重要なのです。
ファクトリーオートメーションの制御システムは、基本的にリアルタイムシステムです。マシンのON/OFFを切り替えるには、非常に短い時間が要求されます。例えば、緊急停止のメッセージとギガバイト単位のデータバックアップのストリームが混ざっていては困ります。リアルタイムのメッセージが常に優先されるべきです。
従来のEthernetシステムでは、このようなプロトコルは存在せず全てのデータは基本的に "平等 "です。これでは、オフィスのコンピュータがネットワークの帯域を共有してサーバやプリンタにアクセスする場合は問題ありませんが、リアルタイムのアプリケーションではうまくいきません。
 代表的な産業用制御システム 画像:Bruno /Germany from Pixabay
代表的な産業用制御システム 画像:Bruno /Germany from Pixabay
このビデオでは、EtherCAT Technology GroupのExecutive DirectorであるMartin Rostanが、EtherCATがどのようにユーザの競争力を生み出すかを20分で説明しています。
EtherCAT物理層
EtherCATは、以下に示すEthernetの物理層とデータリンク層を使用しています。
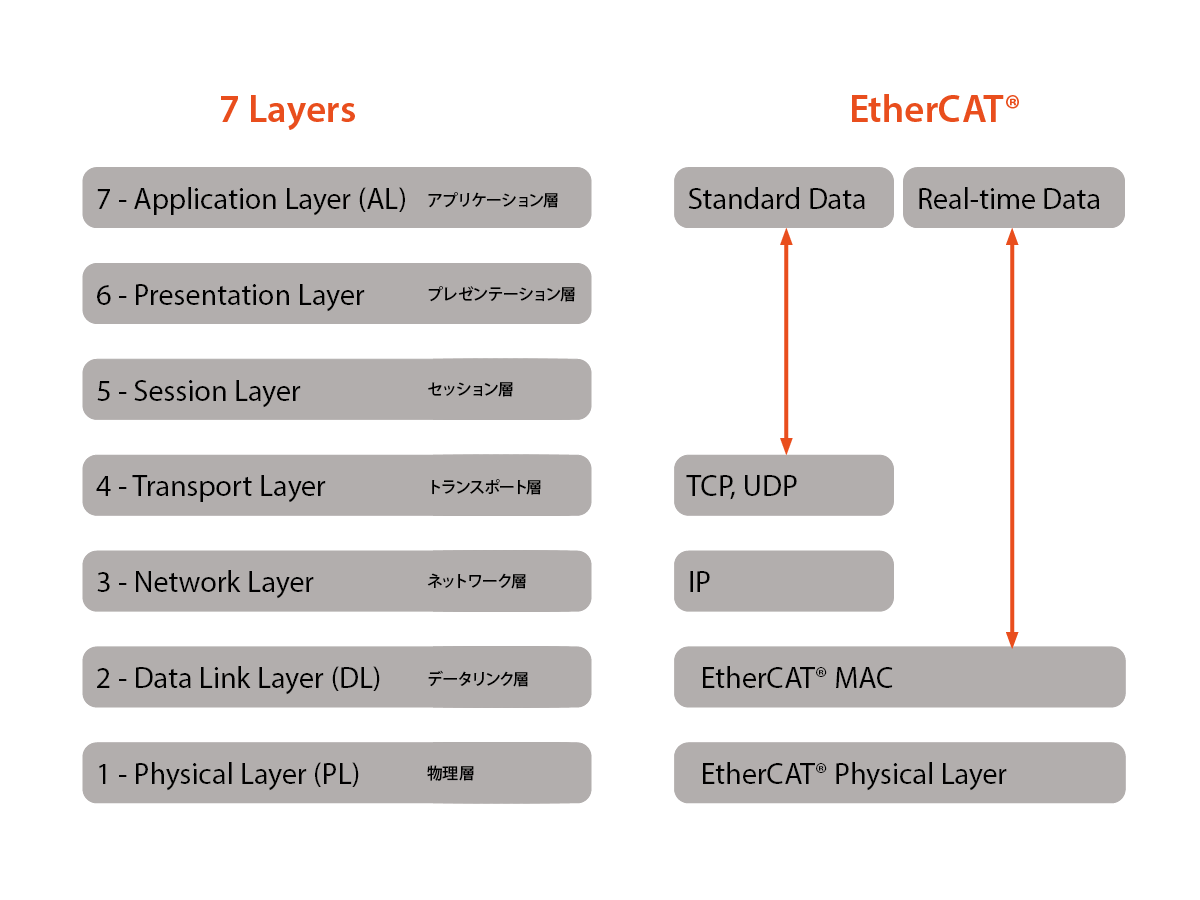 OSI参照モデルのレイヤ3-6をスキップすることで、
OSI参照モデルのレイヤ3-6をスキップすることで、
EtherCATは100μs以下のサイクルタイムと1μs以下の通信ジッタを実現します。
物理層(Physical layer)は、ネットワーク上でデータを物理的に伝達します。これは、ネットワークの中核となる電気、すなわち「機械的」なレベルです。
データリンク層(data link layer)は、データをパケットにエンコードする場所です。ここでのEthernetの実装は問題なく、EtherCATはそれを使用しています。しかしEthernetユーザがよく知っているネットワーク(IP)層(Network layer)やトランスポート層(TCPやUDP)(Transport layer)など他の層は、サイクルタイムのためにEtherCATでは完全にスキップされています。
このプロトコルの他の側面により、EtherCATはEthernetの10msのサイクルタイムを数桁短縮することができます。これにより、実効データレートは100Mbpsとなります。
EthernetとEtherCATネットワークのトポロジーの違い
EthernetとEtherCATでは、物理層とデータリンク層より上の層が異なります。この違いを理解した上で、リアルタイムシステムやDAQシステムのアプリケーションにおけるEtherCATの利点をご紹介します。
 一般的なオフィスのEthernetネットワーク
一般的なオフィスのEthernetネットワーク
オフィスや家庭での一般的なEthernetネットワークでは、複数の機器が基本的に同じレベルで接続されています。どの機器もネットワーク上でデータを送信することができ、どの機器もデータを受信することができます。このネットワークにはおそらく、外部へのアクセスを提供するインターネット機器に接続するスイッチがあるはずです。
この方法は非常に柔軟性がありますが、複数のデバイスが同時に大量のデータを送信または要求した場合、データの過負荷が発生しやすくなります。タイムクリティカルなメッセージは、極端な状況下では速度が低下したりブロックされることもあります。
一方、EtherCATは全く異なる方法で動作します。
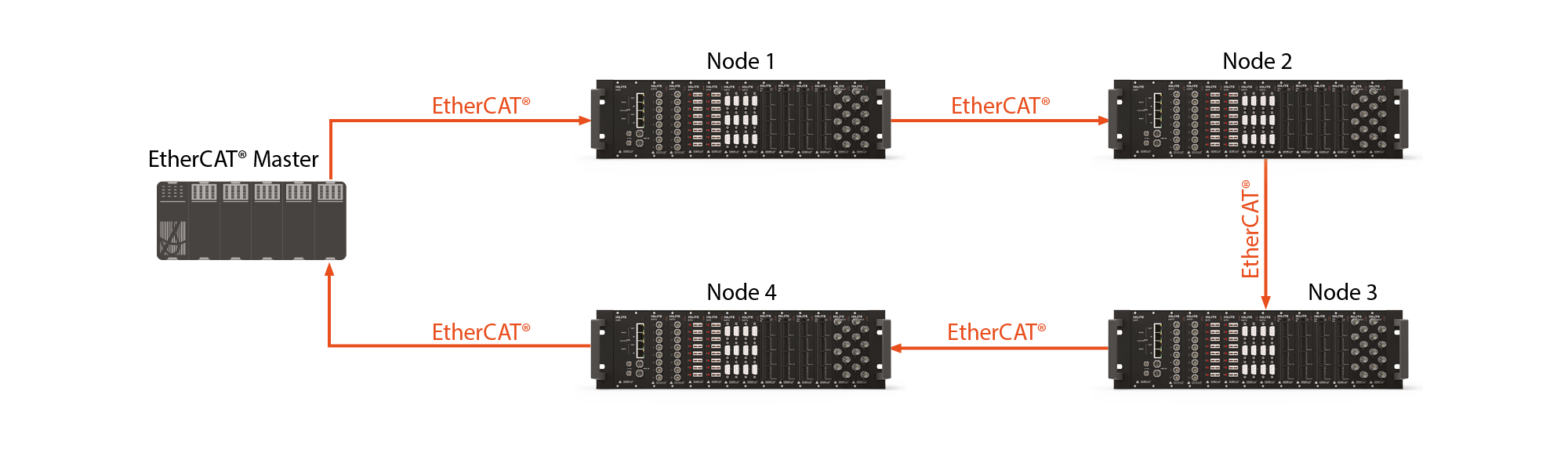 リングトポロジーによるEtherCATネットワーク
リングトポロジーによるEtherCATネットワーク
EtherCATマスターデバイスは、ネットワーク上でデータを送信することができる唯一のデバイスです。マスターはバスを介してデータの文字列を送信し、Ethernetシステムのデータ衝突を回避し結果として速度を最適化します。
EtherCATのフレームは標準的なEthernetのフレーム内に組み込まれ、EtherTypeフィールドに0x88A4の値で識別されます。 マスタはEtherCATセグメント内でメッセージの送信が許可されている唯一のデバイスです。- スレーブはデータを追加してフレームを送信できますが、自分で新しいメッセージを作ることはできません。
これらのフレームは、宛先となるEtherCATスレーブデバイス (ノード) によって受信されます。スレーブデバイスはデータを処理し、マスターから要求された内容を追加し、リング内の次のノードにフレームを送信します。
次のノードは全く同じことを行い目的のデータを取り込んで、必要なデータをEtherCATフレームに戻し次のノードに送信します。
従来のEthernetよりも高速化されているのは、データを送信する機器が1台であることに加えて "Processing on the fly "と呼ばれる手法を採用しているためです。従来のEthernetでは、各機器がメッセージのヘッダを読んでそのデータが自分に向けられたものかどうかを判断し、データを取り込んで何らかの処理をしていました。しかし、"Processing on the fly "では、ノードがヘッダを読み取ると同時にデータを送信するため、時間の短縮と効率化が図れます。
最後に従来のEthernetとは異なり、EtherCATではネットワーク上の複数のデバイスからの受信データと送信データを1つのフレームにまとめることができます。それによっても速度が最適化されます。
興味深いことに、特定のノードがデータを処理するための処理能力を持っていない場合、マスタがバススピードを調整して、ネットワーク上のどのデバイスでもデータが失われることはありません。
EtherCATタイムスタンプ付きデータ
EtherCATの最も重要な点の1つは、分散型クロックです。各ノードはデータを受信したときにタイムスタンプを押し、次のノードに送信するときに再度タイムスタンプを押します。そのためマスターがノードからデータを受信すると、各ノードの遅延を簡単にに判断することができます。マスターからのすべてのデータ送信は、すべてのノードからI/Oタイムスタンプを取得します。これにより、EtherCATはEthernetよりもはるかに決定性が高くT軸の精度が高くなります。
しかし、EtherCATが動作を開始する前に、マスターはネットワーク上のすべてのスレーブノードにブロードキャストを送信し、スレーブノードはそれを受信した時と送り返した時にラッチします。マスターはこの作業を必要なだけ自動的に行い、ジッターを減らし、スレーブノード同士の同期を保ちます。
このタイミングの精度は、リアルタイム制御やファクトリーオートメーションのアプリケーションでは非常に重要です。また、DEWESoftが提供するDAQシステムは、制御システムに簡単に組み込むことができます。
EtherCATに内蔵されている分散型クロックは、IEEE 1588 PTP (Precision Time Protocol)に相当する1マイクロ秒 (1 µs)よりもはるかに小さい優れた「ジッタ」性能を、ハードウェアを追加することなく実現します。
EtherCATのセルフターミネーションがもたらす耐障害性
最後のノードの出力がマスターに接続されていない場合、データは自動的にEtherCATプロトコルを介して別の方向に返されます。タイムスタンプは維持されます。
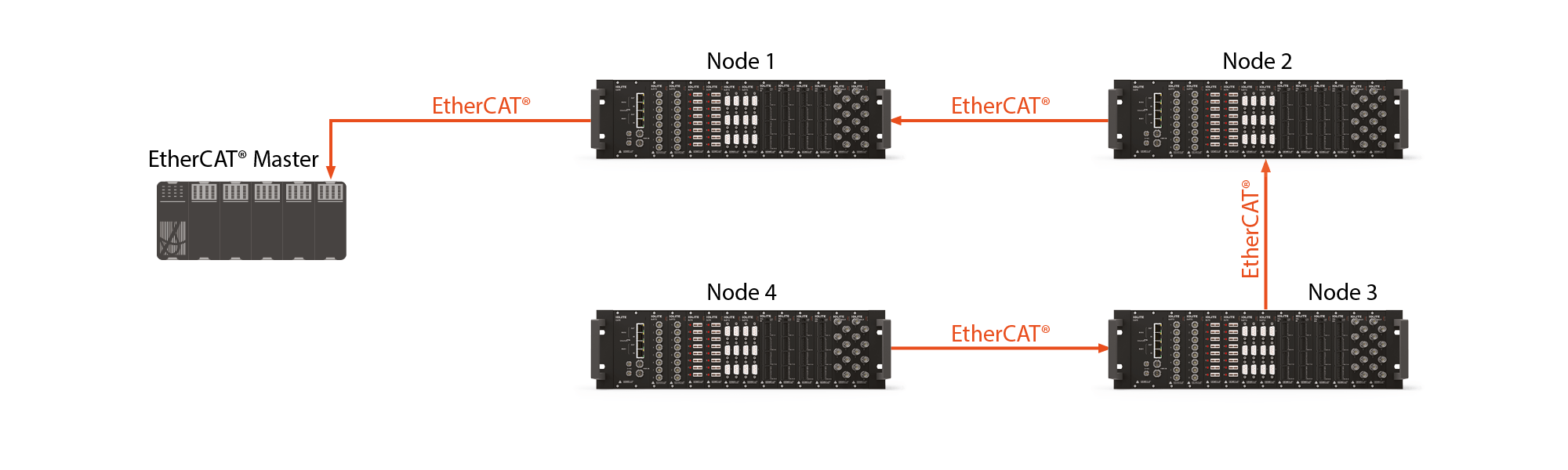 高い耐障害性を持つEtherCATネットワーク
高い耐障害性を持つEtherCATネットワーク
この耐障害性により、EtherCATネットワークは上図のようにリング状に配置する必要はなく、ツリー型,リング型,ライン型,スター型,さらにはそれらの組み合わせなど、様々な方法で構成することができます。
もちろんスレーブとマスターの間には経路が必要です。文字通りプラグを抜けば動作しませんが、重要なのはネットワークのトポロジーは非常に柔軟で、障害に対する耐性も非常に高いということです。
Ethernetシステムにあるようなスイッチは、EtherCATシステムでは必要ありません。ノード間のケーブル長は最大100mまで可能です。ツイストペアの銅線にLVDS(低電圧差動信号)を使用することで、高速かつ低消費電力を実現しています。また、光ファイバーケーブルを使用することで、速度の向上とデバイス間のガルバニック絶縁を実現することができます。
EthernetとEtherCATの比較
| Ethernet | EtherCAT | |
|---|---|---|
| 物理層とデータリンク層の共通点 | ○ | ○ |
| 国際規格 | IEEE-802.3 | IEC 61158 |
| 決定論的タイミング | × | ○ |
| マスター/スレーブ操作 | × | ○ |
| リング式トポロジー | 不要 | ○ |
| リアルタイム制御最適化 | × | ○ |
| データ衝突回避最適化 | × | ○ |
計測と制御用EtherCATデバイス
いくつかの例外を除いて、EtherCATを使用するシステムは2つのグループに分けられます。
- リアルタイム制御装置
- 計測器
PLCなどの制御デバイスはEtherCATネットワーク上のマスターであり、計測デバイスは歴史的に "スレーブ "でした。
しかし、第3のタイプのデバイスがDEWESoftによって発明されました。それはホストへの高速データ取得と、PLCやマスターコントローラのソフトウェア/ハードウェアへのEtherCAT速度データを並行して行うDAQシステムです。
つい最近までは、エンジニアがDAQシステムからのリアルタイムデータを必要とする場合、DAQシステムから複数のアナログ出力(アナログ入力チャネルごとに個別の出力)を取得し、それらをPLCコントローラに入力していました。そのためには複数のアナログ入力と、アナログからデジタルへの冗長変換が必要でした。
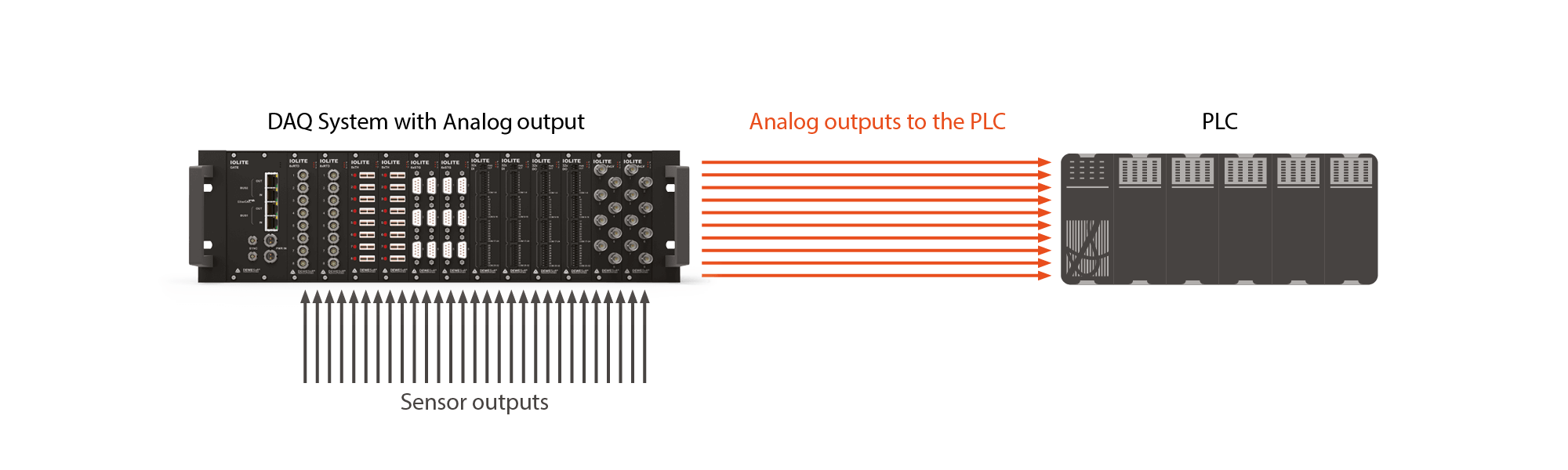 DAQのデータをPLCに送る旧来のアナログ方式
DAQのデータをPLCに送る旧来のアナログ方式
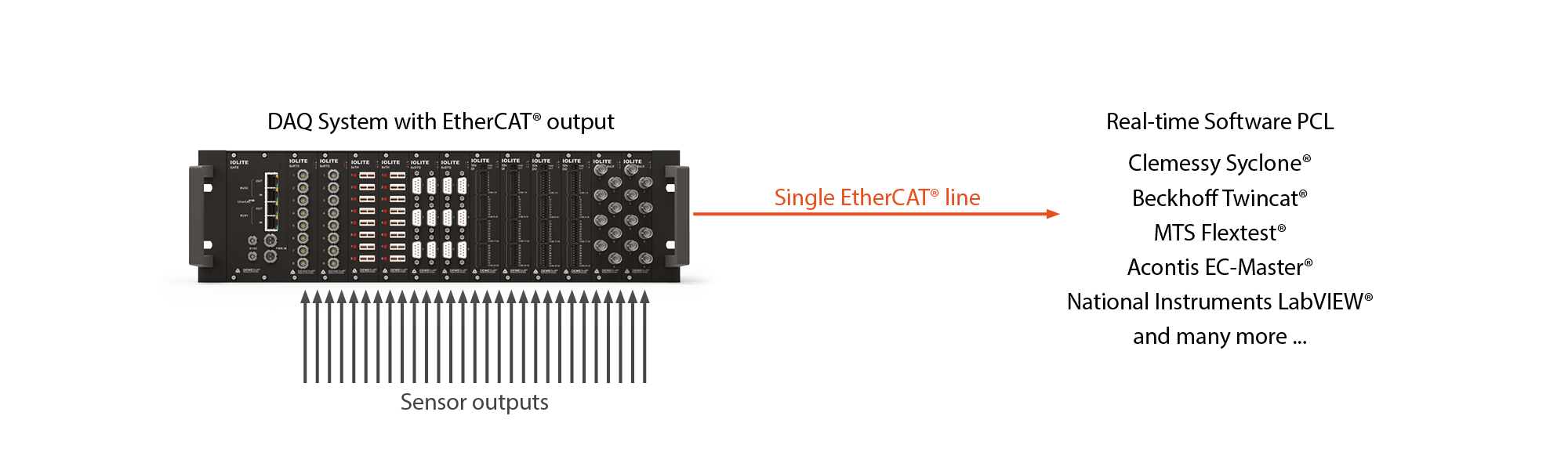
しかし、DEWESoftのDAQシステムにEtherCATスレーブポートを搭載することで、下図のようにPLCの冗長アナログ入力を完全に排除することができます。
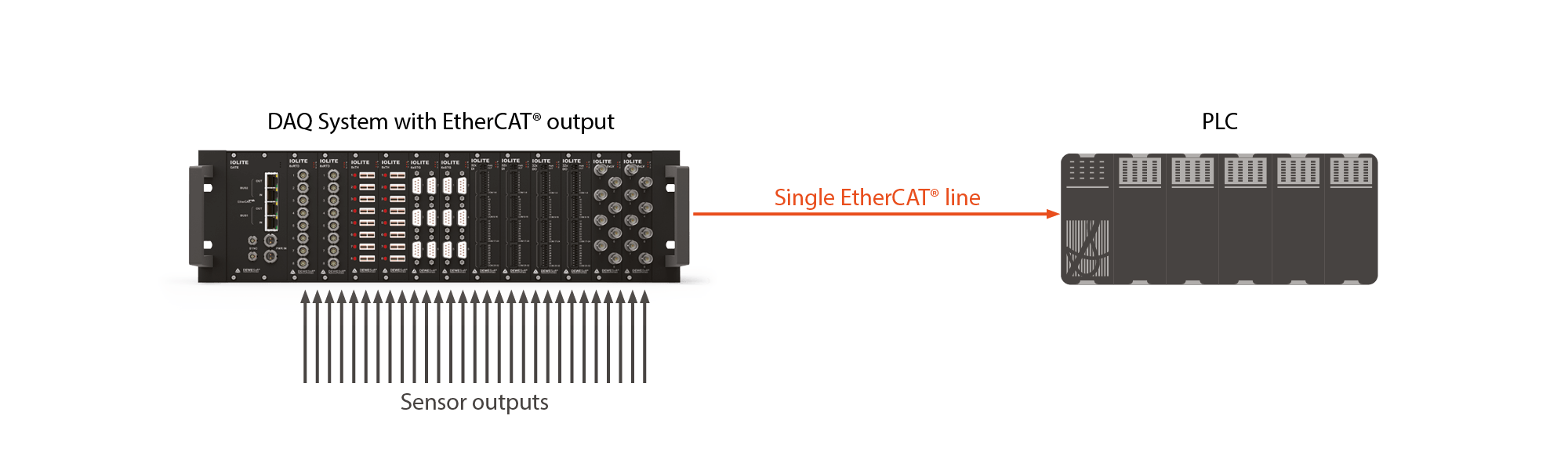 1本のEtherCAT回線でリアルタイムデータを送信するDEWESoftのDAQシステム
1本のEtherCAT回線でリアルタイムデータを送信するDEWESoftのDAQシステム
IOLITEのようなDAQシステムは、多くのアプリケーションでPLCハードウェアを排除できるため、これは実際には始まりに過ぎません。IOLITEは、リアルタイムPLCソフトウェアが動作するコンピュータホストに接続することができます。これには次のようなシステムが含まれます。
- Clemmesy Syclone®
- Beckhoff Twincat®
- MTS Flextest®
- Acontis EC_Master®
- National Instruments LabVIEW®
その他
IOLITEとこれらのリアルタイムPLCソフトウェアシステムをEtherCATで接続すると、IOLITEがアクチュエータを駆動することができ、システムに必要なリアルタイムのハードウェア制御が可能になります。
 IOLITEはEtherCATを介して制御/DAQシステムのハードウェアバックボーンとして機能します
IOLITEはEtherCATを介して制御/DAQシステムのハードウェアバックボーンとして機能します
DEWESoft EtherCATデータ収録および制御ハードウェア
DEWESoftでは、EtherCATに対応した様々なデータ収録システムを提供しています。それぞれの製品について、EtherCAT技術をどのように適用しているのかを見てみましょう。
IOLITE DAQ&制御システム
IOLITEは、産業用のDAQシステムおよびリアルタイム制御システムです。リアルタイム制御とフィードバック監視の両方ができるのが特徴です。各IOLITEデータ収録システムには、独立した2つのEtherCATバスが搭載されており、並行して動作します。
 左:IOLITE-R12(PC接続ラックタイプ) 右:IOLITE-R8(PC接続ボックスタイプ)
左:IOLITE-R12(PC接続ラックタイプ) 右:IOLITE-R8(PC接続ボックスタイプ)
プライマリバスは、DewesoftXソフトウェアによる完全に同期したデータ収録を可能にします。IOLITEは任意の数の入出力チャネルを、高速でコンピュータのハードドライブにストリーミングできます。2つの基本モデルがあり、IOLITE-R12は、19インチのラックタイプで入出力モジュール用のスロットが12個あります。IOLITE-R8は、ボックスタイプで入出力モジュール用のスロットが8個あります。
IOLITEのセカンダリEtherCATバスは、2つの方法で使用できます。
- サードパーティ製のEtherCAT対応リアルタイムコントローラ用の低遅延
フロントエンドインタフェース - 重要なデータ収録アプリケーション用の冗長データ収録システムバス
IOLITEとその「姉妹品」であるR2rt、R4rt、R8rt(次項で説明)は、DAQ/制御システムの中でもユニークな製品です。高速バッファリングされたデータをUSB経由で別のホストにストリーミングしたり、低遅延データをEtherCAT経由でサードパーティのEtherCATコントローラにパラレルに送ることができる、いわゆるデュアルモード機能を提供します。
EtherCATマスターポートによるチャネル拡張
IOLITE DAQおよび制御システムにはデュアル冗長EtherCATポートが搭載されており、SIRIUSやKRYPTONなどのEtherCATを搭載した他のDAQシステムや、追加のIOLITEやIOLITEdモジュールからも同期データを受信することができます。
 EtherCAT搭載のDAQシステムを追加してチャネルを拡張
EtherCAT搭載のDAQシステムを追加してチャネルを拡張
関連ページ
R2rt, R4rt, R8rt DAQシステムシリーズ
R*rtシリーズはIOLITEモデルと同様に、USB経由のホストへの高速ストリーミングと、EtherCAT経由のサードパーティホストへの低遅延データストリーミングを組み合わせたデュアルモード機能を搭載しています。SIRIUSのシグナルコンディショナとADCテクノロジーに加え、EtherCAT経由での決定性データの利点をすべて兼ね備えています。
 R2rt,R4rt,R8rtデュアルモードDAQおよび制御システム
R2rt,R4rt,R8rtデュアルモードDAQおよび制御システム
下表に示すように、SIRIUSモジュール用に2,4,8スロットが用意されており、8~128チャネル搭載できます。
| R2rt | R4rt | R8rt | |
|---|---|---|---|
| SIRIUS DAQモジュールスロット | 2 | 4 | 8 |
| 8チャネルモジュールのみを使用した最大合計チャネル数 | 16 | 32 | 64 |
| 16チャネルモジュールのみを使用した最大合計チャネル数 | 32 | 64 | 128 |
この機能をエンジニアがどのように活用しているかについては、「MTSテストベンチ用ロード・ロードデータロガーおよびシグナルコンディショニング」で紹介されています。以下にその概要をご紹介します。
R8rtを使用したロード・ロードアプリケーションのケーススタディ
自動車業界では、ロード・ロードデータや耐久性試験がよく知られています。自動車やトラックを多軸ロードシミュレータに搭載し、実際の過酷な走行条件での荷重やストレスをシミュレートします。このようにして、エンジニアは人間のドライバーを使うよりも効率的な方法で、自動車のライフサイクル解析を加速することができます(例えば、100時間連続で運転できる人はいません)。
 代表的な多軸ロードシミュレータ
代表的な多軸ロードシミュレータ
多軸ロードシミュレータが使用するデータは、実際の走行テストで得られたものです。DEWESoftのDAQシステムは、車両に同乗し加速度計をはじめとするさまざまなセンサから数十チャネルの動的データを収集することで、これらのテストに長年使用されてきました。
しかし、以前はテストコースで使用していたDAQシステムとロードシミュレータのコントローラは全く接続されていませんでした。テストコース上のDAQで収集したデータをロードシミュレータ内で使用するためには、オフラインで変換する必要がありました。
R8rtシステムのデュアルデータバスを使えば、DAQシステムとコントローラシステムを完全に統合することができ、効率性とコスト削減を実現することができます。データを再デジタイズする必要がなく、EtherCATで送信することで何キロものケーブルが不要になり、テストトラックで使用していたDAQシステムをテストベンチでも使用して負荷シミュレーションを行うことができます。
このケーススタディでは、R8rtシステムがどのようにMTSのロード・ロード試験システムと統合されたかをご紹介します。2つのデータバス(USBとEtherCAT)を組み合わせ、MTSのFlexTest®シリーズ制御装置にEtherCAT通信を実装することで、試験装置は実質的に1つの装置として機能しました。
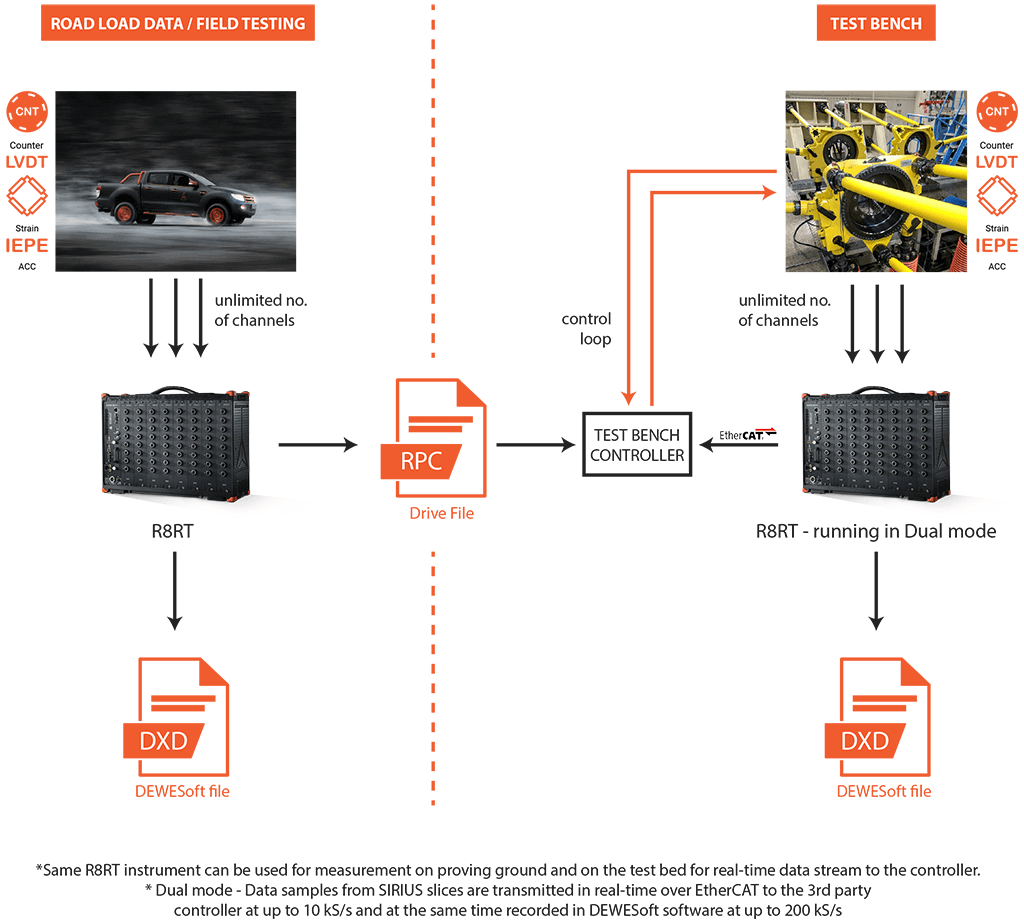 テストコースとロードシミュレータのテストベンチで同じR8rt計測システムを使用
テストコースとロードシミュレータのテストベンチで同じR8rt計測システムを使用
同じR8rt DAQ機器が、テストトラック上の車両で実際の負荷データを収集するためにも、テストベッド上でこのデータをコントローラにリアルタイムでストリーミングするためにも使用されています。
独自のデュアルモード機能を使用して、SIRIUS DAQモジュールからのデータサンプルは、EtherCAT経由でMTSコントローラに各チャネル10 kS/sでリアルタイムに送信されます。同時に、多軸ロードシミュレータ上の車両からのテスト結果は、R8rtの内蔵コンピュータとSSDハードドライブによって、各チャネルあたり最大200 kS/sの高速で記録されます。
KRYPTON - EtherCAT対応 耐環境データロガー
市販のDAQ機器の多くはオフィスや軽工業用に設計されています。しかし、DAQ機器を過酷な環境下に置かなければならない場合もあります。
例えば
- 85℃までの高温
- -40℃までの極低温
- 100gまでの高い衝撃と振動
- 水噴霧または水浸し
- 高い粉塵濃度

繰り返しになりますがほとんどのDAQ機器は、そのような極端な環境条件の中で耐えられるように設計されていません。そこで、DEWESoftはKRYPTONシリーズを開発しました。
1本のEtherCATケーブルで配信
KRYPTONモジュールは、データ,電源,同期を伝送する1本の頑丈なEtherCATケーブルで相互に接続されます。ケーブルの長さは最大50mで、橋の上や広い工場のフロアなど、信号が必要な場所にモジュールを配置することができます。
 KRYPTONモジュールを分散してEtherCATで相互接続
KRYPTONモジュールを分散してEtherCATで相互接続
高速EtherCATインタフェースは、100Mbps全二重バススピードで動作し、チェーンあたり6MB/s~10MB/sのデータスループットを実現します。動的な計測を目的としたモジュールでは、最大40kS/sのサンプリングが可能です。チェーン上のすべてのモジュールは、ノード間の距離が//****100m****//であっても、正確に同期します。
多くのモジュールをこの方法で接続することができます。KRYPTONには多チャネルと、1チャネルのKRYPTON ONEがあり、柔軟性を備えています。
 シングルチャネルのKRYPTON ONEは、様々な信号やセンサに対応しています。
シングルチャネルのKRYPTON ONEは、様々な信号やセンサに対応しています。
防水・防塵性能
KRYPTONは、防水・防塵規格であるIP67に準拠しており、水しぶきだけでなく水深1mに30分間浸漬しても耐えることができます。また埃やその他の小さな粒子に対しても完全に密閉されています。
極端な温度変化に強い
KRYPTONは断熱ゴムが充填されているため、-40℃~85℃の広範囲の温度に耐えることができます。
高温および低温の自動車試験,ロケットエンジンの試験台,アイスクリームなどの冷たい(または熱い)食品を作る工場などで使用されています。
耐衝撃性、耐振動性
KRYPTONは100gの衝撃と高振動環境に対応するように設計されおり、評価されています。これは、大型の振動機械がある多くのアプリケーションや、ロケット、その他の大きな力を生み出す機械のテストにおいて重大な要件となります。
関連ページ
SIRIUS - 高性能DAQシステム
特定のアプリケーションではPLCが記録できる比較的低速のデータを補完するために、非常にハイエンドなDAQが必要となります。DEWESoftのSIRIUSとSIRIUSwe(防水)は、このようなアプリケーションに最適なソリューションです。
SIRIUSは高速USBとEtherCATの両方のデータバスを備えているため、EtherCATマスターが処理できる速度でデータを提供し、並行してDewesoft Xソフトウェアを実行している別のコンピュータへ、より高速なデータを記録することができます。
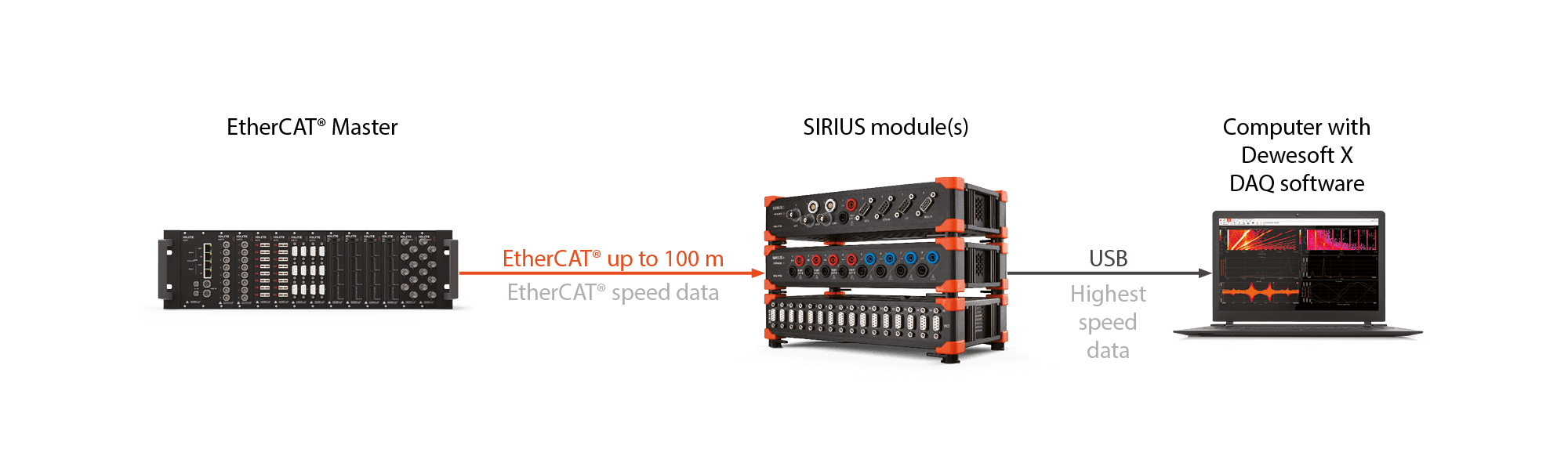 耐障害性デュアルモードデータをEtherCATマスターとコンピューターホストに実行するSIRIUS DAQシステム
耐障害性デュアルモードデータをEtherCATマスターとコンピューターホストに実行するSIRIUS DAQシステム
SIRIUSは、IOLITEシステムに接続してチャネルを拡張することもできます。EtherCATマスターへのデータ送信と、Dewesoft Xソフトウェアを実行している別のコンピュータへのデータ送信を並行して行うデュアルモードの動作は、耐障害性にも優れています。
万一、Dewesoft Xソフトウェアを実行しているWindowsコンピュータが故障した場合でも、SIRIUSはEtherCATマスターにデータを送信し続けます。
関連ページ
Ariane Vロケットの固体燃料ブースターのテストのケーススタディをお読みいただき、800チャネルの高速で絶縁されたDEWESoft DAQおよび制御システムがどのように使用され、EtherCATを使用してサイクロン制御システムに統合されているかをご覧ください。
【動画】2e essai du moteur Ariane 6 - P120C
DEWESoftとCLEMESSYは、ハイエンドのデータ収集能力とフロントエンドの制御を1つのデバイスに収め、効率的でフルパフォーマンスの制御コマンドソフトウェアソリューションを提供しています。フランス国立宇宙機関や欧州宇宙機関が要求する高いレベルの品質は、DEWESoftのソリューションの成熟度を高め、何百、何千ものチャネルを持つ大規模なテストベンチの堅牢性を高めています。
過酷な環境に対応するEtherCATケーブル
DAQハードウェアが防水,防塵,-40℃の温度に耐えられるならば、ケーブルもこれらの極端な環境に耐えられなければなりません。そうでなければケーブルが原因でシステムが故障してしまいます。
そこでDEWESoftは、過酷な環境下で動作するDAQシステムのKRYPTONシリーズとSIRIUS 防水シリーズを接続するためのEtherCATケーブルを開発しました。以下のビデオでは、ケーブルを-40℃に凍結し、柔軟性を維持している様子を紹介しています。
DEWESoftとサードパーティ製EtherCATマスターとの互換性
DEWESoftのEtherCATベースのDAQシステムは、現在市場に出回っているさまざまなサードパーティ製EtherCATハードウェアおよびソフトウェアマスターと互換性があります。
- Clemmesy Syclone®
- Beckhoff Twincat®
- MTS Flextest®
- Acontis EC_Master®
- PLCを備えたNational Instruments LabVIEW®
EtherCATとCANopenの違いは何ですか?
CANopenは、CAN(Controller Area Network)ハードウェアバスをベースにした高レベルのプロトコルです。また、バス上のあらゆるデバイスの仕様も含まれています。EtherCATがEthernetプロトコルの最下位2層(データ層および物理層)を使用しているのに対し(このセクションの”EtherCAT物理層”を参照してください)、CANopenはCAN OSIの最下位2層を使用しています。
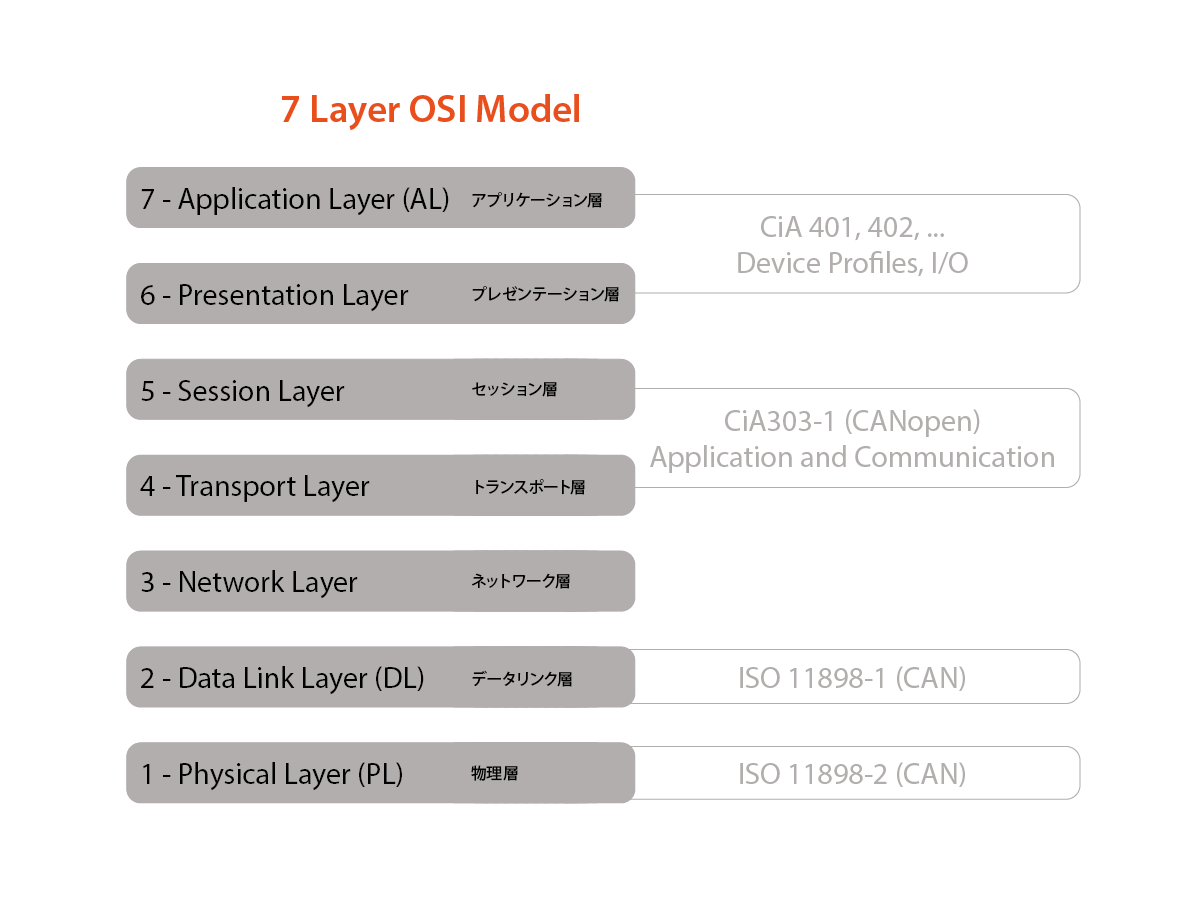 CANopenで実装されている7層のOSIモデル
CANopenで実装されている7層のOSIモデル
CANopenでは、さまざまなメーカーのCANバスハードウェアが利用可能であることが大きな特徴です。CANは自動車の電気配線を減らすことから始まりましたが、数十年の間に、産業,航空宇宙,エネルギーなどほぼすべての業界と数千のアプリケーションで使用されるようになりました。実績と信頼性のあるCANハードウェアの上に、ハイレベルなCANopenプロトコルを載せることで、システムの開発と展開がこれまでよりもはるかに容易になります。
CANopenはハードウェア通信層としてCANを使用し、デバイスを統合するための高レベルでシンプルな方法を提供します。CANopenプロトコルは、ハードウェア特有の多くの低レベルのタスクを処理し、開発を簡素化し高速化します。受け入れフィルタリングやビットタイミングなど、CAN特有のハードウェアの問題をCANopenプロトコルによって処理します。CANopenは、時間に敏感なプロセスやその他のハードウェア管理タスク用の通信オブジェクト(COB)を提供します。
EtherCATはシングルマスター/マルチスレーブからなるアーキテクチャです。マスタは各スレーブにアドレスを割り当て、ネットワークの伝送速度を制御し、すべてのデバイスの時間同期を最初に行いますが、これは必要に応じて繰り返されます。マスターはメッセージの送信を許可された唯一のデバイスです。スレーブはメッセージに反応し、タイムスタンプ付きの応答を挿入して、マスターに返す役割を担っています。
CANopenネットワークは、複数のマスターを持つことができます。ただし、インテグレータは、各デバイスが固有のアドレスを持ち、すべてのデバイスが同じビットレートに設定されていることを確認する必要があります。CANopenシステムの最高推奨ビットレートは1000 kbpsです。
CANopenシステムには最大127台のデバイスを搭載することができ、そのうちの1台はマスターである必要があります。EtherCATセグメントには最大65,535台のデバイスを搭載できます。デバイス間の最大距離は100mです。
EtherCATは決定性が高く、100Mbpsで1μsよりも優れたジッターを実現します。CANopenのSYNCテレグラムは1フレーム長に制限されており、1Mbpsで130μsのジッターが発生する可能性があります。
トップレベルの比較:EtherCATとCANopen
| EtherCAT | CANopen | |
|---|---|---|
| データと物理的なハードウェア層 | Ethernet | CAN bus |
| バス速度 | 100 Mbps | 1 Mbps(最大) |
| 転送モード | 全二重 | 半二重 |
| 決定性(デバイス間のジッター) | 最短1ns | 通常100~200 ns |
| 最大 デバイス | 65,536 | 127(0は予約済み) |
| 最大 デバイス間の距離 ※1 | 100m | バススピードに依存:1.5m@1Mbps 2.5m @ 800 kbps 5.5m @ 500 kbps 11m @ 250 kbps |
| 2次通信ポート | USB | RS232 |
| マスター/スレーブ | 単一のマスターと1つまたは複数のスレーブ | シングルまたはマルチマスター、1つまたは複数のスレーブ |
| マスターによるスレーブの自動アドレス設定 | ○ | × |
| マスターによるデバイスの自動時刻同期 | ○ | × |
CANopen規格は、CAN in Automation (CiA) International Users and Manufacturers Groupによって管理されています。
EtherCAT規格は、EtherCAT Technology Groupが管理し、IEC 61158で標準化されています。
EtherCATもCANopenも、以下のような様々な産業やアプリケーションで使用されています。
- オートモーティブ
- 運輸・鉄道
- インダストリアル
- ヘルスケア
- 産業機器
- ファクトリーオートメーション
- 農業分野
- 航空宇宙
どちらのプロトコルも最新で、よくメンテナンスされており便利です。低・中速の分散アプリケーションにはCANopenが適しています。高速アプリケーション,特に高精度,確定的な時刻同期を必要とし、制御(DAQの有無にかかわらず)を組み込んだアプリケーションでは、EtherCATがより良い選択肢となります。

【動画】扱いやすいDEWESoftのデータ収録機器
関連ページ
CANopen Over EtherCAT (CoE)の仕組みとは?
この記事を通して見てきたように、EtherCATはEthernetハードウェアを活用した堅牢なシステムであり、デバイス間の距離は最大100メートルで、柔軟なネットワーク構成に対応し、決定性の高いデータフロー、マスターによるスレーブの自動時刻同期などを実現します。
CANopenにももちろん利点があります。CANopenはEtherCATよりも歴史が長く、ハードウェアコストが低く、実装が容易なため、何千回も採用されてきました。CANopenとEtherCATの両方の長所を考慮すると、両者を組み合わせて両方のシステムを活用する方法があることはほぼ明らかです。このプロトコルはCANopen over Ethernet (CoE)と呼ばれ、エンジニアはCANopenの全機能を高速で堅牢なEtherCAT上で使用することができます。
CoEプロトコルには、プロセス・データ・オブジェクト(PDO)とサービス・データ・オブジェクト(SDO)が含まれています。SDOプロトコルは直接実装されているため、ほぼすべての既存のCANopenスタックを変更することなく使用できます。
PDOスタックは高速で決定性のあるEtherCATハードウェアによって転送されますが、CANopenの8ビットの制限を受けません。EtherCATとCANopenのステートマシンは類似しているため、CANopenプロファイルをEtherCAT上で動作するように変更する必要はほとんどありません。CoEは全てのCANopenデバイスプロファイルをサポートし、CANステートマシンを含みます。
EtherCATの高い帯域幅により、オブジェクトディクショナリ全体をネットワーク上にアップロードすることができます。また、多数のデバイスプロファイルを再利用することができ、開発時間とコストを削減できます。
マルチプロトコルEtherCATは、CANopenデバイスを動作させるためのパワフルで高速なプラットフォームであり、産業用Ethernetへの移行を容易にするブリッジの役割を果たします。
EtherCATと標準Ethernetの違いは何ですか?
まず、EtherCATはこのセクションで説明したように、Ethernetプロトコルの最初の2層をベースに構築されています。したがって、最下位レベルでは非常に強い類似性があります。しかし、ネットワーク,トランスポート,アプリケーションレベルではないためEtherCATにはTCP/IPやUDPは存在しません。
EtherCATは、リアルタイムで決定性のあるマスター/スレーブシステムとして最適化されています。
EtherCATフレーム(メッセージ)は、標準的なEthernetフレームの中に組み込まれています。
しかし大きな違いもたくさんあります。
- EtherCATネットワーク上では、マスターのみがメッセージを送信し適切なスレーブにメッセージを送り、タイムスタンプ付きのデータを受け取ります。 これは、すべてのデバイスがメッセージを送ることができ、データが決定論的な方法でタイムスタンプはされないEthernetネットワークとの大きな違いです。
- EtherCATは決定論的で、非常に低遅延のリアルタイムデータがスレーブからマスターに返されます。
- EtherCATネットワークでは、マスターは低遅延のタイムスタンプを容易にするために、全てのスレーブを起動時や間隔を空けて時間調整する役割を担っています。この機能はEtherCATには組み込まれていますが、標準的なEthernetネットワークには追加する必要があります。
- EtherCATは極めて少ない待ち時間で、デバイスやシステムをリアルタイムに制御することを目的として設計されました。Ethernetは主にオフィスでの使用を想定して設計されており、コンピュータ,プリンタ,その他のネットワーク周辺機器を相互に接続します。
- 標準的なEthernetネットワークとは異なり、EtherCATネットワークでは上記のような制限があるため、データの衝突は起こりません。
- EtherCATネットワークでのデータ転送は、標準的なEthernetネットワークよりも高速です。実質的に100Mb/sで、ジッターも非常に少なくなっています。
- Ethernetと同様に、EtherCATネットワークもライン,リング,スターなどさまざまなトポロジーで構成することができます。
Ethernetを使用してEtherCATを導入するにはどうすればよいですか?
EtherCATネットワークでは、標準的なEthernetケーブルを使用してデバイスを相互に接続します。つまり配線に関しては、EtherCATネットワークもEthernetネットワークも同じCAT5ケーブルを使用します。
しかし、質問が他のEthernetデバイスをEtherCATネットワークに接続するようなものであれば、Ethernet over EtherCAT (EoE)と呼ばれるプロトコルを調べる必要があります。
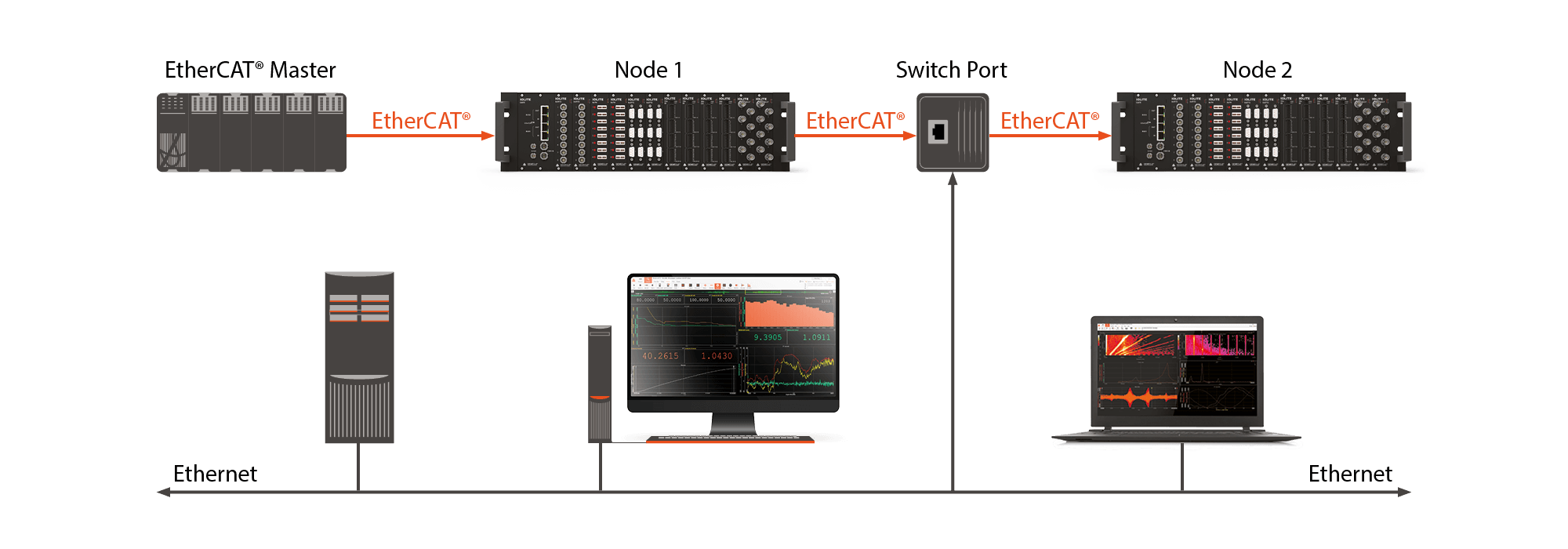 Ethernetデータはスイッチポートを介してEtherCATシステムにトネリングされます
Ethernetデータはスイッチポートを介してEtherCATシステムにトネリングされます
EoEは、WindowsクライアントアプリケーションがEtherCATネットワーク上のデバイスと通信するためのプロトコルです。Ethernetパケットは、クライアントからスイッチポートと呼ばれるデバイスを介してEtherCATネットワークに送信されます。スイッチポートは、ネットワークに干渉しないようにTCP/IPメッセージを既存のEtherCATシステムメッセージに挿入することで、EthernetデータをEtherCATプロトコルにトネリングします。
スイッチポートは、Beckhoff 6601のように、Ethernet(IEEE 802.3)ベースのすべてのプロトコルをサポートし、500Vの電気的に絶縁された別個のデバイスとして実装することができます。この製品は、EtherCATセグメント内のどこにでも設置することができ、設定は必要ありません。
EtherCATネットワーク上のスレーブデバイスの1つの機能として実装することもできますし、EtherCATマスターのソフトウェア機能として実装することもできます。
EtherCATマスターとは何ですか?
すべてのEtherCATセグメントまたはネットワークには1つのEtherCATマスターが必要です。このマスターはネットワークを担当し、ネットワーク上でメッセージの送信を許可されている唯一のデバイスです。また、ネットワーク上の全てのスレーブの時刻を同期させ、各スレーブにアドレスを割り当てる役目もあります。スレーブにデータを要求し、要求されたデータを含む修正されたメッセージをスレーブから受信する役割を果たします。
EtherCATマスターは、標準化されたEthernet OSIモデルのレイヤ2(データ層)にあるMAC(Media Access Controller)を使用してデータを送信します。追加の通信プロセッサは必要ありません。つまり、Ethernetポートを持つ任意のデバイスに、EtherCATマスター機能を実装することができます。
その結果、EtherCATマスターは、実行するオペレーティングシステムに関係なく、専用のハードウェアとしても、コンピューター上で実行されるソフトウェアとしても利用できます。EtherCATマスターは、Microsoft Windows,Linux,QNX,RTX,VxWorksなどのために開発されました。
コンピュータをEtherCATマスターとして使用する場合、唯一の要件はEthernetポートです。これは内蔵されたポートでも、NIC(ネットワークインターフェイスカード)を追加したものでも構いません。ほとんどのNICはダイレクトDMAアクセスを備えており、CPUがデータアクセスに関与しないため、非常に高性能なシステムが実現できます。
EtherCATデバイス間の最大距離はどれくらいですか?
これは非常に多くの変数があるため、1つの答えのでない質問です。まず、EtherCATセグメントのトポロジーはライン,リング,ツリー,スター,そしてこれらの組み合わせとなります。
次に、EtherCATはセグメント上で最大65,536個のユニークデバイスをサポートしており、非常に多くのデバイスがサポートされ、同時に接続できることを意味しています。もちろん、このようなシステムの実用性には疑問があります。
標準的なEthernetケーブル(100BASE-TX)を使用した場合、セグメント上の2つのデバイス間の最大距離は100mです。
しかし、光ファイバーケーブル(100BASE-FX)を使えば、この100mを最大2kmまで伸ばすことができます。
実際には、ほとんどすべてのEtherCATシステムは、一般的な工場の建物や工場内の特定のエリアに展開されています。
リアルタイムアプリケーションに最適なEthernetのようなプロトコルはどれですか?
EtherCAT,Profinet,または他の何か?
実際に現在使用されている産業用Ethernet(IE)プロトコルは、EtherCATとProfinetだけではありません。EtherCAT,Profinet,EtherNet/IP,Powerlink,SERCOS III,Modbus TCP,CC-Link IEなどがあります。
これらのプロトコルの目的は、低コストで高速なEthernetハードウェアを活用して、産業用プロセス制御環境における監視・制御システムを構築することであり、同時に時刻の同期性,確定性,環境耐性を劇的に向上させることです。
2003年に導入されたProfinetは、産業用Ethernet上での通信のための技術規格です。1989年に導入されたプロセスフィールドバスで、IEC 61158で管理されているProfibusと混同してはいけません。ProfibusはRS485シリアル通信をベースにしているのに対し、ProfinetはEthernetをベースにしています。Profinetシステムは、Profibusシステムの既存の部分を変更することなく組み込むことができるので、それらの古いシステムのアップグレードパスとして魅力的です。
これらすべての産業用Ethernetシステムは、Ethernet OSIをどの程度使用しているかによって特徴付けられます。冒頭で述べたように、EtherCATはEthernet OSIの最初の2層のみを使用し、トランスポート層 (TCP, UDP) などをスキップしています。これは、リアルタイム制御アプリケーションで最速のサイクルタイムと最高の決定性を実現するためです。
しかし、ここでは質問に基づいてEtherCATとProfinetに焦点を当て、それらがEthernet OSIをどのように使用しているかを見てみましょう。
| Ether CAT | Profinet V1 | Profinet V2 | Profinet V3 | |
|---|---|---|---|---|
| レイヤー7 アプリケーション層 Application |
フィールドバスアプリケーション層(FAL)。サービスとプロトコル | |||
| レイヤー6 プレゼンテーション層 Presentation |
RSI(リモートサービスインターフェイス)またはRPC(リモートプロシージャコール)が使用されます | |||
| レイヤー5 セッション層 Session |
RSI(リモートサービスインターフェイス)またはRPC(リモートプロシージャコール)が使用されます | |||
| レイヤー4 トランスポート層 Transport |
TCP / IP,UDP | |||
| レイヤー3 ネットワーク層 Network |
IPはスイッチポートを使用して同期的に挿入 | IPサービス | IPサービスは利用可能ですが、非同期 | |
| レイヤー2 データリンク層 Data Link |
MAC Ethernet | |||
| レイヤー1 物理層 Physical |
IEEE802.3に準拠した全二重100MBit / s銅線(100BASE-TX)または光ファイバー(100BASE-FX)を使用できます。 | |||
上の表から、Profinetには3つのバージョンがあることがわかります。
- バージョン1(V1):コンポーネントベース(CBA):100msのサイクルタイム
- バージョン2(V2):Real-Time(ソフトウェアリアルタイム):約10msのサイクルタイム
- バージョン3(V3):Real-Time (ハードウェア・リアルタイム): 1ms未満のサイクルタイム
Profinet バージョン2では、トランスポート(TCP / IP)層は使用されませんが、Ethernetフレーム内で伝送される専用のプロセスコントローラに置き換えられます。 バージョン2ではこのコントローラはソフトウェアで実装されていますが、バージョン3ではハードウェアで実装されており、Profinetで利用可能な最高のサイクルタイムを実現しています。
これらの変更は、プロトコルによるTCPやIPの使用を妨げるものではなく、それらへの依存を避けるものです。
CBA(component-based automation)と呼ばれるProfinetバージョン1は、もはや十分にサポートされていません。多数の変数を処理することはできず、旧来のProfibusから産業用Ethernetの世界への架け橋とみなされていたからです。今日の焦点は、以前はSRT(ソフトウェア・リアルタイム)やIRT(非同期[ハードウェア]リアルタイム)と呼ばれていたProfinet IOにあります。
Profinet IOでは特別なハードウェアを追加することで、モーションコントロールアプリケーションに使用するのに十分な速度と決定性を実現しています。Profinet IO (IRT)はパフォーマンスにおいてEtherCATに最も近いので、このトップレベルの比較では他の2つのバージョンではなく、EtherCATに焦点を当てます。
| 機能/パラメータ | EtherCAT | Profinet IO(IRT) |
|---|---|---|
| ネットワークあたりの最大ノード | 65,536 | 64 ※1 |
| サポートされているトポロジ | ライン,リング,ツリー,スター,およびそれらの組み合わせ | ライン,ツリー,スター |
| 自動ネットワーク回復 | ○ | × |
| マネージドネットワークスイッチ | スイッチやハブを使用しないEtherCATには適用されません | 必須 |
| 分散クロック技術 | ○ | × |
| ネットワーク速度 | 2 x 100 Mbps(全二重) | 2 x 100 Mbps(全二重) |
| サイクルタイム | 100 µs | < 1 ms |
| 同期精度 | ~1 ns | <1 µs |
| ジッター | <1 µs | <1 µs |
| トラフィックバーストによる中断の影響を受けやすい | × | ○ ユーザーはネットワーク負荷を 管理する必要がある ※2 |
| スレーブデバイスの 自動アドレス設定 |
○ 新しいデバイスが追加された場合でも、マスターはこれを自動的に行う |
× システムインテグレータは、すべてのデバイスに固有のアドレスがあることを確認する必要がある |
| コスト水準 | 一般的に多くのフィールドバスシステムよりも安い | 統合コストとソフトウェアコストの増大 |
すべての主要な指標において、EtherCATは優れた産業用Ethernetソリューションです。高速性,実装の容易性,柔軟性,トポロジーに関して低コスト化を実現しており、ライセンス費用のかからない完全なオープンスタンダードとなっています。
さらに、DAQシステムと産業用プロセス制御システムの統合に焦点を当てていますが、EtherCATはDAQ統合を成功させるために必要なフック,スピード,低遅延,決定性のレベルを提供します。私たちが調査した他のプロトコルはこれを提供していません。
EtherCATのまとめ
この記事でEtherCATについて多くのことを学んでいただき、産業用制御アプリケーション、特にDEWESoftのIOLITEのようなDAQシステムやKRYPTON,SIRIUSのような拡張モジュールに関連するEtherCATの利点を理解していただければ幸いです。
EtherCATの利点
- 高性能 - 産業用Ethernetトポロジとして最速の200Mb/s(全二重=100Mbps×2)を実現
- 決定論的 - 同期によるリアルタイム動作 ~1 ns
- 柔軟なトポロジー - リング,ライン,ツリー,スターなど無制限に配置可能
- ハブやスイッチ不要 - 実質的に無制限のネットワーク拡張が可能
- 簡単な操作 - マスターが自動的にノードのアドレスを割り当て、クロック同期メッセージを送信
- シンプルな設定 - IPアドレスやMACアドレスを管理する必要なし
- 手頃な価格 - 従来のフィールドバス・ネットワークと同等かそれ以下の低価格
マスターコントローラは比較的安価
EtherCATアプリケーション
- ファクトリーオートメーション
- PLCネットワーク
- サーボドライブ制御
- データ収集(DAQ)システム
- モーションコントロール,マシンコントロールプラットフォーム
- ロボット工学
- マテリアル&バゲージ処理システム
- 計量システム
- 印刷機
- 半導体製造
- 金属,パルプ・紙製造業
- 発電所
- テストベンチ
- 風力発電機
- 農業機械
- フライス盤
- トンネル制御システム
- 安全システム
その他多数
DAQおよびEtherCATの利点
- 高度なDAQシステムからの高速および低速データを、リアルタイム制御システムに統合できるようになりました
- 冗長なA/D処理を排除することで複雑さを減らし、精度を向上させ、コスト削減を実現します
- 必要に応じて高度な解析を行うために、別の超高速データファイルが用意されておりPLCデータとも同期しています