モーダルテストとは何ですか?
モーダルテストと取得したテストデータは、モーダル解析を行い、テストオブジェクトの構造ダイナミクスに関する結論を出すための基礎となります。
このセクションでは、モーダルテストの基本的な理解を得るのに十分な情報と、その後のモーダル解析のためにデータを取得する方法について説明します。
モーダルテストは、テストオブジェクトを振動させるために人工的な加振源を適用する方法と、テストオブジェクトを稼働状態で走らせ、その場で振動させるin-situ試験の2種類があります。
実験的モーダル解析(EMA)
実験的モーダル解析(EMA)テストは現場でも、より制御された実験室環境でも行うことができます。実験室でのテストは、SNR(信号対雑音比)が高く、テストセットアップを簡単に変更できるという利点があります。
EMA試験では人工的な力で物体を加振し、入力(加振)信号と出力(応答)信号の両方を計測して、モーダルモデルを推定します。
動作時のたわみ形状(ODS)
動作時のたわみ形状(ODS)は、機械や構造物がその動作条件の中でどのように動くかを確認するための、シンプルな動的解析方法です。ODS試験では、人工的な力を加えず、応答振動信号のみを計測します。
モーダルモデルはODS計測値から推定することはできませんが、構造的なたわみ形状を提供することで、動作中のDUTの構造解析を改善します。
ODSは機械の状態を監視したり、人工的な力では加害しにくい橋やビルなどの土木分野でも使用されています。
VIDEO
【動画】Dewesoft DAQハードウェアとDewesoftXソフトウェアを使用して行われた
関連ページ
運用モーダル解析(OMA)
OMA(Operational Modal Analysis)のモーダルテスト計測手順はODSと似ていますが、解析部分が異なります。ODSとOMAの違いについては、「ODS vs OMA」の項で詳しく説明しています。
テストの準備
モーダルテストを始める前に、以下のようなテストの準備が必要です。
試験体の取り付け
モーダルテストを行う場合、DUT(テスト対象デバイス)は、構造体のすべての固有周波数とモードシェイプを明らかにする方法で動的に振動できなければなりません。
自由な振動パターンまたは構造が実際に動作しているときに予想される同様の振動パターンを追求するために、構造体を固定する場所には、ゴムバンド,弾性ワイヤ,発泡パッドなどの軟質弾性体を使用して、構造体を吊るしたり配置したりすることがよくあります。
たとえば、テスト構造がテスト中のいくつかの位置に固定されている場合、つまりテスト構造が実際に動作しているときに自由に振動している場合、計測された動的特性は、構造の実際の使用法とは完全には関連しません。 この構造により周波数が上方にシフトし、一部のモード形状が検出されなくなる可能性もあります。
剛体運動(リジッドボディモーション)
剛体運動(剛体モード)は、剛体としてのDUT全体の振動であり、DUTの構造的な動特性(フレキシブルモード)の情報は得られません。このような剛体モードは、選択されたサポート構成に関連しています。
DUTの取り付け方によっては、剛体モードが構造体のフレキシブルモードに許容できない影響を与える可能性があります。剛体モードがフレキシブルモードに与える影響は、剛体モードの周波数がフレキシブルモードにどの程度近いか、また、許容できる計測精度はどの程度かによって異なります。
経験則では、FRFが剛体モードとフレキシブルモードの間で10:1以上の周波数比を示していれば、モーダルデータを受け入れることがよくあります。例えば、最後の剛体モードが1Hz、最初のフレキシブルモードが10Hzです。ただしこの場合も、一部のフレキシブルモードがある程度影響を受けるため、特定のアプリケーションの合意された精度に常に依存します。
別のサポート構成を導入する場合は、それがフレキシブルモードにどのような影響を与えるかを評価することです。
加振力の種類
EMAのテストでは異なる入力加振タイプを選択することができます。どのタイプを選択するかはユーザのシナリオによって異なります。
モーダルハンマを用いた衝撃加振は、小型の均質な構造物や現場での計測に最適なソリューションであることが多い。
大規模で複雑な構造物の場合、非線形性の検討,低いクレストファクタ,高い信号/ノイズ比などより詳細な解析が必要となるため、モーダルシェーカー/エクサイターからのサインスイープ,ランダムノイズ,その他の加振タイプが最適なソリューションとなる。
複雑な構造の場合、適切なモーダルモデルを抽出するために、すべてのモードが十分に高い関与を示す加振位置(リファレンスDOF )が見つからない場合は、複数の加振器が必要になることがある。さらにモーダルシェーカーでは、力のレベルを正確にコントロールすることができる。
その他のシナリオでは、電気油圧式加振器やドロップハンマーなどの非標準的な加振器が選択され、特別な目的のために優れた入力加振を提供する他の加振方法も選択される。
加振の場所(駆動点)
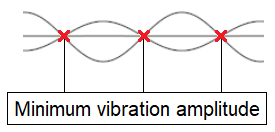
EMAテストでは、振動特性のほとんどが明らかになる場所でオブジェクトを励起することが重要です。 たとえば、一部の振動モードパターンが常に最小の振動振幅を持つ場所でオブジェクトが励起された場合、これらのモードはエネルギーを吸収せず、励起されません。
最小の振動振幅が存在するモードの節点位置
適切な励起位置を特定するためには、多くの場合、異なる駆動点の位置を比較するプレテストが行われます。また、有限要素モデル(FEM)があれば、それを用いて適切な励起位置を決定することもできます。
ODSおよびOMAテストでは入力力信号を使用しないため、すべての構造モードのエネルギー成分が含まれるように、どのモードの節点にも属さないリファレンス応答DOFを選択することが特に重要です。
力と反応を計測するハードウェアとセンサ
EMAの試験では、入力された加振は通常、駆動点の力変換器またはインピーダンスヘッドによって計測されます。インピーダンスヘッドは、力センサと加速度センサの両方を備えており、駆動点の計測によく用いられます。
インピーダンスヘッドの代わりに、加振点の力センサの近くに加速度センサを設置することもできます。応答信号は加速度計で計測されることがよくありますが、他のプローブを使用することもできます。
複数の加速度センサは、データの一貫性を最適化し計測時間を短縮するために選択されることが多く、より大きな複雑な構造の場合、加速度センサの数は簡単に大きくなります。
応答センサの数が限られている場合は、「ロービング」計測を行うことができます。このシナリオでは、テスト実行の間に応答センサのグループを移動させます。このようなサブテストを重ねることで、すべてのDOFの位置を完全に計測することができます。
異なるモードが異なる直交する方向にたわむ場合は、X Y Z方向に配置された3つのセンサを持つ3軸加速度計を使用することができます。
(左)インピーダンスヘッド:PCBタイプ288D01
センサは感度が異なるため、周波数範囲も異なります。モーダルテストに含まれる周波数範囲とレベル範囲をサポートするようにセンサを選択してください。また、これらのダイナミックレンジは、選択したDAQデバイスでサポートされている必要があります。
センサからの質量負荷が比較的大きい場合には、物体の振動が異なるため、センサの重量も考慮する必要があります。目安としては、センサの質量が対象物の質量の1/10以下であることです。
DEWESoftの最新デジタルデータ収録システム
関連ページ
ジオメトリーモデル
ほとんどの場合モーダルテストを開始する前に、ジオメトリモデルを作成する必要があります。
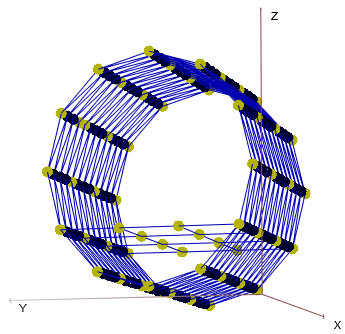
ジオメトリは、ポイント,トレースライン,サーフェスで構成されており、ポイントのいくつかは計測する場所を示しています(DOF(Degrees Of Freedom)とも呼ばれます)。DOFは、例えば「0012, Z+」のように、ノードポイントの位置と計測する方向を定義します。
ジオメトリモデルは、エンジニアが計測に最適なDOFのセットを選択したり、計測プロセスを概観してガイドしたり、計測対象物の決定されたモードシェイプのたわみを視覚化したりするのに役立ちます。
ジオメトリモデルの例。黄色のDOFは計測するために選択されたDOFです。
どのようにしてモーダルテストを行うのか?
テストの準備が完了したら、実際にモーダルテストを開始します。EMAテストでは、テストの状況に応じて、1つまたは複数のモーダル励振器と1つまたは複数の応答センサを使用するのがよいでしょう。これらの異なるテスト構成は、「シングルリファレンスモーダルテスト」と「マルチリファレンスモーダルテスト」のセクションに分類されます。以下、ODSテストについて説明します。
シングルリファレンスモーダルテスト
テストケースによっては、1つのリファレンスDOFのみを持つ計測データからモーダルモデルを抽出するだけで十分な場合もあります。
ここでの仮定は、選択されたリファレンスDOFがすべてのモードに関する情報を含んでいることです。これは、どのモードもノーダルポジションにないようにリファレンスDOFの位置を選ぶことができれば可能です。実際には、すべてのモードが計測データの中に十分に「存在」する必要があるということです。
シングルリファレンスロービングハンマーテスト
ロービング・ハンマー・テストでは、応答DOFは 1つだけ、つまり加速度計の位置も 1つだけ必要となります。このようなロービング・ハンマー・テストでは、加速度センサの応答DOFがリファレンスDOFとして使用され、ハンマーはDOF間をロービングします。これは、SISO(Single-Input Single-Output)と呼ばれる試験構成の一例です。
シングル応答リファレンスDOFを使用したロービングハンマーのSISOモーダルテスト
■シングル・リファレンス・ロービング型加速度センサテスト
別のタイプのロービングテストを選択することもできます。ここでは、リファレンスDOFとして使用されるモーダルエキサイタ(例:ハンマーや加振器)を使用し、1つまたはグループの加速度ピックアップはすべてのDOFが計測されるまでロービングします。これはロービング・レスポンス・テストとも呼ばれています。
複数の加速度センサを使用する場合は、SIMO(Single-Input Multiple-Output)テスト構成と呼ばれます。
単一の励起基準DOFを使用したロービング加速度計SISOモーダルテスト
この構成の欠点は、加速度センサの質量が構造体の各点で異なる影響を与え、その結果、計測に影響を与えることです。この影響を質量負荷といいます。
また、各ロービング計測の間にセンサの移動と取り付けを再度行わなければならず、ロービングハンマーテストよりも時間がかかります。
■シングル・リファレンス・シェーカー・テスト
シングルリファレンスモーダルテスト(1つのリファレンスDOFのみを使用いてモーダルモデルを抽出すれば十分な場合)には、モーダルシェーカーを使用することもできます。
より正確なモーダルモデルの決定を必要とするモーダルテストでは、モーダルシェーカーがよく選択されます。
モーダルシェーカーを使用する場合、リファレンスDOFはシェーカーの励起位置として選択されることがよくありますが、これは通常、シェーカーを再配置(ロービング)する方が加速度センサのグループをロービングするよりも時間がかかるためです。
シングル励起リファレンスDOFのモーダルシェーカーを使ったSIMOモードテスト
マルチリファレンスモーダルテスト
テストケースによっては、複数のリファレンスDOFでの計測が必要な場合があります。これは、すべてのモードが計測データの中で十分に「存在」する適切なリファレンスDOFを見つけることができない場合です。
例えば構造物は様々な部分で、主なモーダルのたわみを持つ異なるモードを示すことがあります。このようなモードは、しばしばローカルモードと呼ばれます。
この例は、構造特性の異なる複数のパーツで構成された複雑な構造物などです。
また、試験体が同じ共振周波数でより多くのモードがある場合にも、マルチリファレンステストが必要です。これはよく「リピートルーツ」や「密結合モード」と呼ばれています。
リピートルーツの例は、ある種の対称的な構造を持つ場合です。このような場合、例えば、互いに垂直な2つの曲げモードは、その共振周波数に関して密接に結合する可能性があります。
リピートルーツを持つ対称プレートに2つの曲げモードが発生する図
計測されるリファレンスDOFの数は、同じ周波数のモードの数と(少なくとも)等しくなければなりません。
■マルチレファレンスロービングハンマーテスト
ハンマーテストについては、モードテストに複数のリファレンスDOFを含めるために、複数の応答センサをリファレンスDOFとして使用することで実現できます。
2つの応答リファレンスDOFを持つロービングハンマーのSIMOモーダルテストの図
■マルチリファレンスシェーカーテスト
マルチシェーカーテストは通常、より多くの加速度センサを使用して行われ、MIMO(Multiple-Input Multiple-Output)構成となっています。
複数のシェーカーを使用することの主な利点は、入力された力のエネルギーが構造物のより多くの場所に分散されることです。これにより、特に大型で複雑な構造物や減衰の大きい構造物の場合には、構造物の振動応答がより均一になります。
このようなタイプの構造物に十分な振動エネルギーを与えるために、1台のシェーカーのみを使用した場合、入力励起レベルを高く設定しすぎることがあります。これは非線形効果の原因となり、モーダルモデルの推定値が悪くなります。より多くの場所で励起することで、実際の操作中に構造物が受ける励起力をよりよく表現することができます。
また1台のシェーカーを回転させるのではなく、複数のシェーカーを使用することで、より一貫したデータを得ることができ計測時間を短縮できるというメリットもあります。一貫性のあるデータは、マルチリファレンスモーダルテストデータを用いたモーダル解析には欠かせません。
複数のモーダルシェーカーを使用する場合は、励起センサをリファレンスDOFとして使用します。
2つの励起リファレンスDOFと1組の応答DOFを持つ、マルチシェーカーMIMOモードテストの図
■リファレンスDOFにおける識別可能なモード
マルチリファレンス構成では、抽出されるモード形状は、リファレンスDOFで「異なっている」必要があります。言い換えれば、これらのモードのモードシェイプは、リファレンスDOFにおいて線形独立でなければなりません。これを実現するには、適切なDOFをリファレンスDOFとして選択する必要があります。
例えば、プレートには2つの密接に結合したモード(同じ周波数で共振)があり、あるDOFではどちらのモードも同じようなたわみ方をするとします。2つのリファレンスDOFが2つの似たようなたわみのDOFに配置されていると想像してください。この場合、計測されたリファレンスDOFデータには、モードを分離するために必要な情報は含まれていません。
1つ目の曲げモード(左),1つ目のねじりモード(中央),そして両方のモードと2つのリファレンスDOFの良い位置と悪い位置(右)。
■マルチリファレンス励起タイプ
マルチリファレンスシェーカーテストでは、通常、相関性のないランダムな励起信号タイプ が使用されます。ランダムな励起信号の種類は、連続,バースト,周期的ランダムなどがあります。
また正弦波の励起信号を用いて、ステップサインテストやノーマルモードチューニングなどのサインテストを行うこともできます。
サインテストでは個々の励起DOFにおいて、特定の周波数に対する励起力レベルをそれらの間の位相パターンとともに制御することが可能です。
DOFでの励起レベルや位相パターンを制御することで、特定のモードに「チューニング」することができます(Normal Mode Tuning)。これは、特定のモードの非線形調査を行う場合など、単一のモードを詳細に調査したい場合に非常に有効です。
サインテストでは、すべてのエネルギーを1つの特定のモードに集中して励起することができます。このようにして、入力エネルギーのかなりの部分を1つの周波数に減少または集中させることができます。これをランダムな励起信号と比較すると、エネルギーが全周波数範囲に分散し、すべてのモードを同時にカバーすることができます。
ODS(操作上たわみ形状)テスト
ODSテストは、通常のEMAの実施が困難な稼働中の構造物の支配的な構造振動を解析し、修正点を決定するための貴重なツールとなります。
動作試験の条件の例としては、エンジンの回転による連続的な信号,地震,爆発,落下試験などの過渡的な信号があります。
ODSテストでは、動作中のDUTの構造的なたわみ形状を、DOFの振幅と位相の情報を計測することで決定します。
入力された励起信号を使用せず、出力された応答信号のみを使用します。応答DOFのうち1つまたは複数のDOFをリファレンスDOFとして選択し、位相情報を抽出します。
なお、選択したリファレンスは、対象となるすべての周波数/次数のエネルギーをカバーする必要があることに注意してください。
たわみ形状は、時間ODS,スペクトルODS,非定常ODS(速度を変化させたテストに使用)のいずれかによって決定されます。いずれの場合もODSの結果は、ジオメトリ上のアニメーションのたわみ形状と、それに関連する振幅と位相の情報となります。
■タイムODS(Time ODS)
タイムODSの結果は動作中のDUTの全体的なたわみを表していて、ユーザはどこでたわみを確認するか時間を調整することができます。
タイムODSテストでは、DOFの計測された時間信号を用いて、リファレンスDOFに関連する振幅レベルと位相を抽出します。この作業はすべての時点で行われ、たわみを時間軸上でアニメーション化することができます。
位相情報を抽出するために時間信号を使用するため、ロービング加速度センサのテストを行う際に使用するのは難しいことに注意してください。このような場合には、すべてのロービング計測セットの位相が揃うように、正確なトリガーメカニズムが必要となります。通常、タイムODSは、ロービングせずにDUTをカバーするのに十分な加速度センサがある場合に実行されます。
■スペクトルODS
スペクトルODSの結果は、ユーザが決定した個々の周波数におけるDUTのたわみを表しています。
スペクトルODSテストでは、DOFの周波数データを処理して、リファレンスDOFに関連する振幅と位相を抽出します。これはスペクトルデータのすべての周波数成分に対して行われ、たわみの形状を周波数軸上でアニメーション化できます。
■非定常型ODS(Non-stationary ODS)
非定常ODSの結果は、ユーザが決定した個々の回転数におけるDUTのたわみを表します。
非定常のODSテストでは通常、DOFの動的リサンプリング(Order Tracked)されたスペクトルデータを用いて、リファレンスDOFに関連する振幅と位相を抽出します。これは、回転に関連するスペクトルデータのすべての次数成分に対して行われ、たわみは次数軸上でアニメーション化されます。
関連ページ
DUTのギアやベアリングなどの回転コンポーネントは、計測された速度の異なる次数または分数で回転することがよくあります。これらの部品は、速度に依存しないさまざまな次数のコンポーネントとして表示されます。このように、さまざまな次数に注目することで、たわみ形状を異なる回転するDUTコンポーネントに絞ることができます。
速度の変化に伴って特定の次数での形状のたわみが変化する場合は、関連するDUTコンポーネントがそのような速度変化の影響を受けていることを示しています。
テスト計測値の平均化
同じDOFの場所で行われた複数の計測値を平均化することが重要です。
なぜでしょう?各計測値には、システムの共振周波数やモードシェイプの決定に影響を与えるランダムなノイズが含まれています。複数の計測値を平均化することで、ランダムなノイズ成分を減らすことができます。
より多くの平均値を選択すれば、ランダムノイズはさらに減少します。平均化するための望ましい計測ブロック数を決定するのはエンジニア次第です。その決定は、結果の質と必要なテスト時間とのバランスを考慮して行います。
一般的には、全体で平均化することが目安となります。
シェイカーテストでは32~64の平均値
ハンマー衝撃試験では4~8の平均値
通常、モーダルテストのアプリケーションソフトウェアでは、各DOFの計測で使用する平均値の数をユーザが指定することができます。通常の衝撃励起試験(計測ブロックごとに1つの衝撃)では、ユーザは指定された平均数に等しいDOF位置のセットにそれぞれ衝撃を与える必要があることを意味します。
コヒーレンス 関数を見ることは、モーダルテストを行う際の主要な検証ツールですが、1回の計測でコヒーレンス値が1になったからといって惑わされてはいけません。
定義上、コヒーレンス関数は複数の計測値に基づいているため、平均化を行った後でなければ有用なデータは得られません。
平均化は全DOFではなく、個々のDOFの位置データに対して行う必要があります。
例えば、同じDOFに基づいてオートスペクトルと、クロススペクトル を平均化する場合に有効です。これらの平均化されたスペクトルに基づいて、FRF やコヒーレンス関数などのモーダルテストの結果が算出されます。
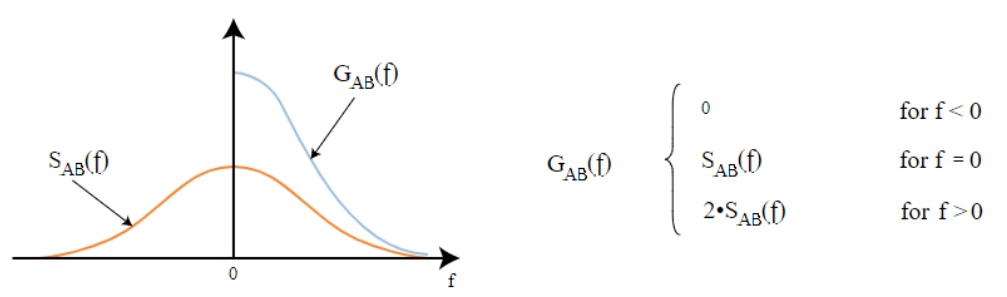
オートスペクトラとクロススペクトラについては「付録 」をご覧ください。
モーダルハンマーとは何ですか?
モーダルハンマーは、ハンマーによる衝撃試験に使用され、通常は単純な構造物に対して実施されるか、より複雑なモーダルシェーカー試験の前に簡単な調査として使用されます。それは加振器を構造物に取り付けることなく、センサという比較的少ない設備で行うことができます。一般的には、少ない計測ポイントで十分なモーダル試験のセットアップと実施にはほとんど時間がかかりません。
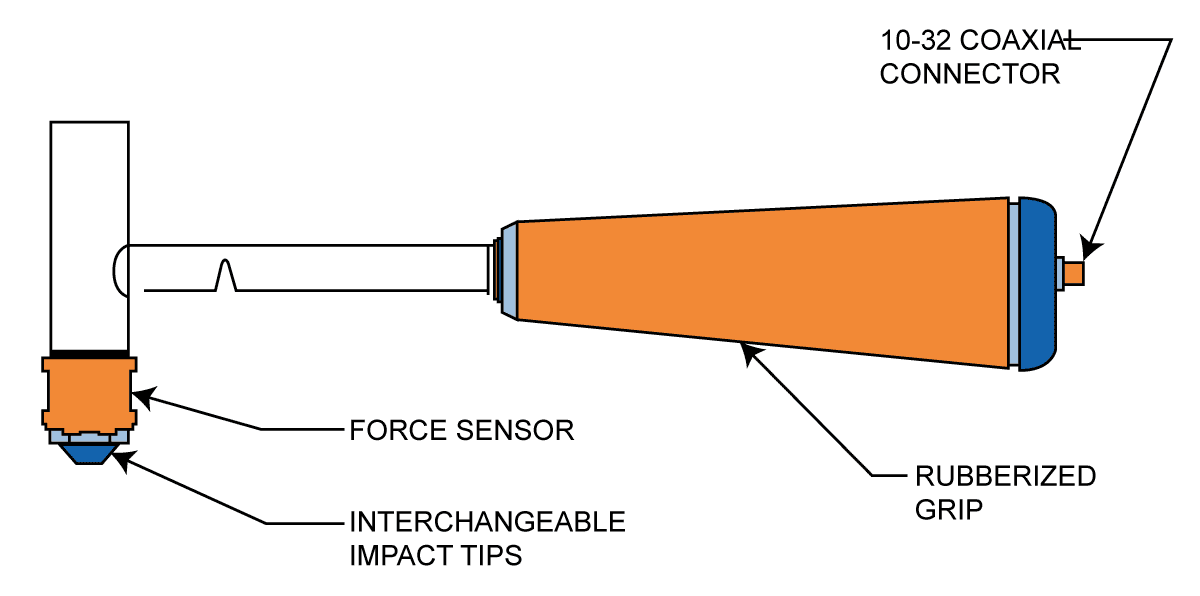
モーダルインパクトハンマーのコンポーネント
モーダルハンマーの種類
モーダルハンマーは、加振対象となる構造物の種類によって、サイズや仕様が異なります。
PCBピエゾエレクトロニクスモーダルハンマーの図-モデル:086C03(左)
どのモードのハンマーが特定の作業に最適なのかを知るには、以下の表を目安にするとよいでしょう。
ハンマー
アプリケーション
レンジスケール
感度
質量
小型
小さな構造物:回路基板,プロセッサおよびメモリモジュール,その他の繊細な製品
<100 lbf pk,<444 N pk
> 50 mV /lbf,
< 0.36 lb,
中型
中型構造物:車のフレーム,エンジンブロック,小型電気モーターなどの中重度の装置
100~1.00k lbf,pk、444~4.44k N pk
50-5 mV /lbf,11.2-1.10 mV/ N
0.36~1.00 lb,
大型
重い構造物:ポンプ,コンプレッサー,溶接物,インペラー,建物の基礎,その他の非常に大きな構造物
> 1.00k lbf,pk,
<5 mV / lbf,
> 1.00 lb,
上の表はさまざまなモーダルハンマーサイズの用途と特性を示しており、特定のテストシナリオに対してハンマーを選択する際の参考となります。
最適なハンマーを選択した後は、追加の特性を考慮する必要があります。
周波数特性 - 周波数範囲、使用する最適なインパクトチップの選択
ハンマーの寸法と重量 - 実用上の注意点
計測範囲 - 十分な衝撃力レベルを提供
感度 - 弱すぎる信号レベルと過負荷レベルのバランスをとる
非線形性 - 一貫性,精度
ハンマチップ
モーダルテストに含める周波数範囲については、正しいハンマーチップの選択が重要です。先端の素材が硬いほど周波数範囲は広くなりますが、ダブルヒットを避けるのが難しくなります。軟らかいハンマーチップは衝撃時間が長くなり、低周波数での構造体へのエネルギー伝達が良くなりますが、モーダルテストの周波数範囲は小さくなります。
目安としては、モーダルテストの上限周波数で減衰が6dB以下となる周波数特性を持つハンマーチップ素材を選ぶことです。
モーダルハンマーの周波数特性がチップハーネスによってどのように影響を受けるか
関連ページ
モーダルシェーカーとは何ですか?
モーダルシェイカーは、大型の構造物や複雑な構造物を加振し、高品質なモーダルデータを得るために使用される加振器(シェーカー)です。モーダルハンマーと比較して、モーダルシェイカーはより広い周波数範囲で構造物を加振することができ、また多くの異なる信号タイプで加振することができるため、様々な構造物に最適であり、正確な試験結果を得るために最適です。
また、モーダルシェーカーを制御して、ユーザーが定義した特定の加振レベルで構造物を加振することができます。この加振レベルは、加振周波数を基準としたフラットな加振カーブやシェイプされた加振カーブを得るために使用することができます。加振器の加振レベルを制御することで、構造物を致命的な高振幅のたわみから保護することができ、また、非線形効果を分析するために異なるレベルの試験を行うことができます。
複数の加振器を併用し、振幅や位相のパターンを制御することができます。複雑な構造物に複数の加振器を使用することで、より現実的な力の加振が可能となり、すべてのモード形状の調査が可能となります。
モーダルテスト用加振器の種類
モーダルシェーカーには様々なタイプの加振器があります。
永久磁石シェーカー
モーダルシェーカー
慣性シェーカー
それぞれのタイプには長所と短所があります。例えば、最大加振力のレベル,周波数範囲,そして特にシェーカーのDUTへの取り付け方法についてです。
永久磁石シェーカー
永久磁石シェーカーは、加振器のアーマチュアに直接DUTを固定できる汎用タイプで、ヘッドエキスパンダーを使用することで振動面積を拡大し、より大きな対象物にも対応できます。
永久磁石シェーカーは、一般的に次のような用途に使用されます。
マイクロパーツの振動試験およびアセンブリや電子機器のモーダルテスト
衝撃試験
センサーキャリブレーション
疲労,共振試験
教育,研究
モーダルシェーカー
モーダルシェーカー(別名:モーダルエキサイター)は、モーダルテストを行う際に、通常の振動加振器と比べていくつかの利点があります。
たとえば、DUTを加振器のアーマチュアに固定する代わりに、モーダルシェーカーが「スティンガー」と呼ばれるコネクティングロッドを介してDUTに取り付けられます。
モーダルシェーカーは、スティンガーのアーマチュアが貫通しているため、シェーカーを動かさずにスティンガーをDUTに合わせて必要な長さに調整することができ、セットアップが簡単になります。
モーダルシェーカーは、一般的に次のような用途に使用されます。
電子回路基板
サブコンポーネント
機械
自動車
航空機,その他大型構造物
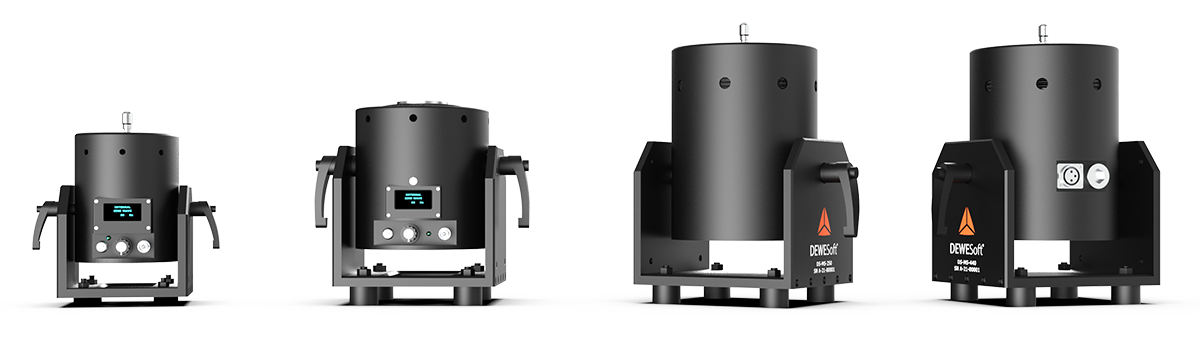
異なるpkpk変位、出力力、および周波数範囲を備えたDewesoftモーダルシェーカー
モーダルシェーカーは、下表のように様々な仕様のものがあります。
出力力
周波数範囲
変位 PkPk
~20 N, 4.5 lbf - 500 N, 112 lbf
~0 Hz - 12 kHz
~5mm, 0.2インチ - 25 mm, 1インチ
モーダルシェーカーが使用できる一般的なレンジ
スティンガーは細いフレキシブルな棒で、主に軸方向の力をフォースセンサやインピーダンスヘッドに伝えることでモーダルテストの精度を向上させます。また、横方向の柔軟性により、DUTとモーダルシェーカーの両方を危険な力から守ります。
モーダルシェーカーとフォースセンサを結ぶスティンガー接続図
慣性シェーカー
慣性シェーカーは、低周波数帯の加振が必要な構造物に使用されます。これらの加振器は構造物に直接接続されており、シェーカーの質量の慣性運動が構造物に必要な力を与えています。
慣性シェーカーは、モーダルシェーカーと同じように、モーダル試験や一般的な振動試験に適しています。構造物の寸法、必要とされる加振周波数とレベルに応じて、モーダルシェーカーまたは慣性シェーカーのいずれかを使用することができます。
質量,出力力,周波数範囲が異なる慣性シェーカー
慣性シェーカーには、下表のように様々な仕様のものがあります。
出力力
周波数範囲
シェーカーの総質量
~5 N, 1.1 lbf - 40 N, 9 lbf
~10 Hz - 3 kHz
~0.05 kg 0.11 lb - 0.5 kg、1.1 lb
慣性シェーカーが使用される一般的なレンジ
関連ページ
シェーカーの励起信号
振動シェーカーの励起信号にはいくつかの種類があります。
それぞれのタイプを詳しく見ていきましょう。
ランダム
ランダム(または純粋なランダム)励起は定義された周波数範囲において、振幅と位相がランダムに変化する「ホワイトノイズ」を提供します。ランダムな励起ではランダムな信号が周期的でないため、スペクトル推定値に漏れが生じます。リークは、時間重み付け窓(ハニング窓など)を使用したり、スペクトルの分解能を上げる(スペクトル線の間隔 を狭める)ことで、ある程度処理することができます。
ランダムに加振することで、クレストファクター(ピークとRMSの比)やS/N比がかなり良くなります。これは、非線形性がある場合にシステムを線形近似するために、(平均化しながら)使用するのに最適な信号タイプの1つです。平均化が必要なため、テスト時間が長くなります。
正規ガウス分布の確率密度を特徴とするランダムなホワイトノイズの時間信号a(t)
バーストランダム
一方、バーストランダムは、純粋なランダムに比べて、適切なバーストレートを選択することで、リークフリーを実現することができます。このような場合は、均一なウィンドウ(ウィンドウなし)を使用することができます。バーストランダム励磁タイプは、比較的高速で使用できる信号タイプですが、ピュアランダム励磁に比べてクレストファクターが大きくなり、S/N比が低下します。
ランダムなホワイトノイズのバースト間に信号の切れ目があるバーストランダム時間信号
疑似ランダム
疑似ランダム励起タイプは高速で漏れがなく、クレストファクターとS/N比がかなり良好です。一方、疑似ランダム信号は、非線形システムの線形近似には使えません。
疑似ランダム励起信号では、同じブロックのランダムな時間信号が繰り返されループしています。
これにより、試験体はその振動を周期的な応答に安定させ、矩形の重み付け窓を使用することで、漏れのない計測を実現することができます。
擬似ランダム時系列信号。
擬似ランダム信号は、FFTの時間ブロック長()と等しい繰り返し時間ブロック長を持ち、FFTの周波数ライン()の整数倍のエネルギー成分のみで構成されるように選択されたエルゴード定常信号です。
疑似ランダム信号では、スペクトル成分のエネルギーは固定されていますが、位相はランダムです。スペクトル成分の固定エネルギーは、使用する周波数範囲で一定であるか、共振周波数付近にエネルギーを集中させるシェープが可能です。
周期的ランダム
周期的ランダム信号は、ランダム信号と疑似ランダム信号を組み合わせたもので、漏れのない計測が可能で、システムの線形近似に最適です。ただし、ランダム信号や擬似ランダム信号を用いた場合に比べて、計測時間が長くなります。
周期的ランダム信号とは、時間とともに変化する擬似的なランダム信号のことです。例えば、ある擬似ランダム信号がFFTの時間ブロック()の数だけ実行されると、別の擬似ランダム信号に変化します。このプロセスは、モーダル計測を通じて継続されます。
この方法では,異なる擬似ランダム信号によって得られる定常応答に構造体が落ち着くまでの時間があります。モーダル解析には各疑似ランダム信号の最後の時間ブロック(構造体が落ち着いたとき)のみを使用します。
異なるタイプ/レコードの擬似ランダム信号を持つタイムブロックの異なるセクションで構成される
疑似ランダム信号と同様に、周期的ランダム信号もエルゴード的な定常ランダム信号です。FFTの周波数増分の整数倍のエネルギーのみで構成されています。しかし、周期的なランダム信号では、スペクトルの内容がランダムな振幅とランダムな位相分布を持っています。
正弦波チャープ
チャープ信号を使用すると、正弦波スイープがFFT時間ブロック ごとに定義された周波数範囲を通過します。 チャープ信号は疑似ランダム信号と同じカテゴリにあり、同じ有用な特性と欠点があります。 ただし、正弦波チャープの場合、波高比は2未満に減少し、信号対雑音比は高く、スペクトルの内容はフラットな大きさと滑らかな位相を持ちます。 チャープ信号は、構造物の非線形性の計測に最適です。
FFTタイムブロック長Tごとに決定された周波数範囲を通過する正弦波チャープ時系列信号のスケッチ
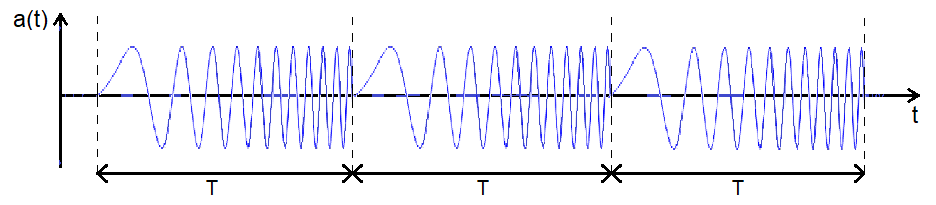
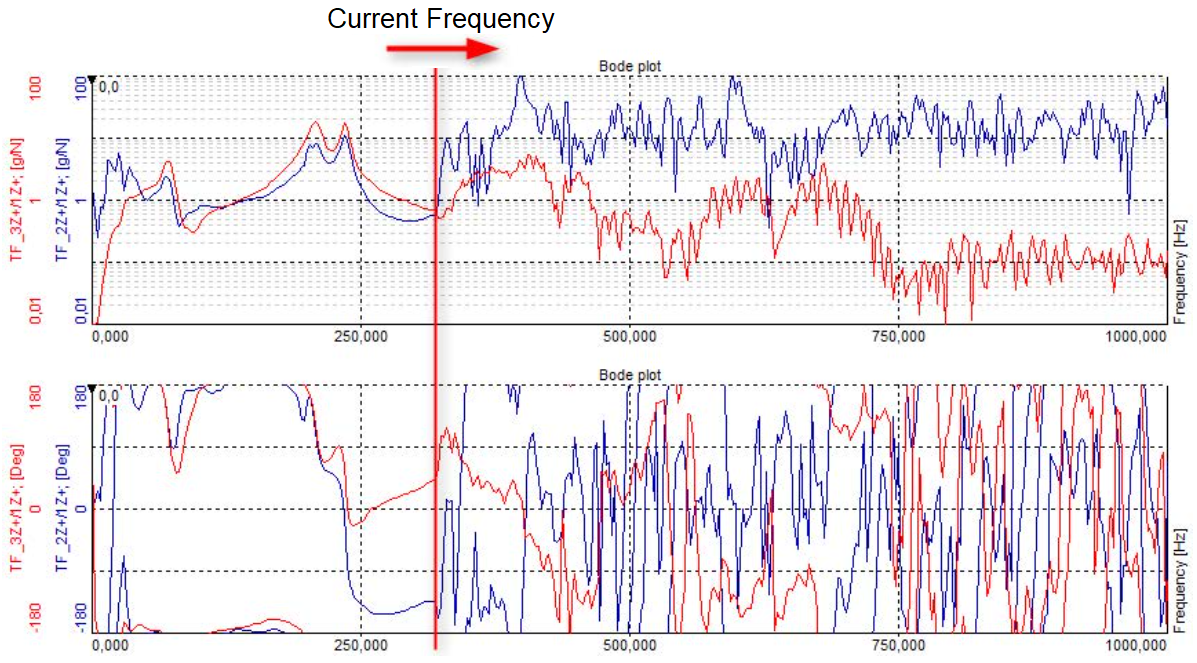
スイープサインとステップサイン
スイープサインとステップサインは、チャープと同じ信号特性を持っていますが、各FFT時間ブロック では全周波数範囲をカバーしていません。その代わりに、周波数範囲のごく⼀部だけがまとめて処理され、最終的なフルレンジの計測値は、一連の処理された周波数成分で構成されます。
掃引正弦波モーダルテスト例。赤い水平線は現在の掃引周波数を示しています。
チャープ励起と同様にスイープサインやステップサインは、構造物の非線形性を調べるのに適しており、ユーザーが定義したスイープレートやステップレートにより、特定の周波数やモードを簡単かつ詳細に解析することができます。
ステップサインではその周波数でデータを抽出する前に、構造が定常応答に落ち着くまでの時間があります。抽出後、信号が次の周波数にステップすると、構造は再び落ち着きます。このプロセスは、全周波数範囲で継続されます。
異なるステップ周波数では、振幅を制御することができます。複数のモーダルシェーカー(つまり複数の加振信号)を同時に使用する場合は、その位相パターンも制御されます。
多くのソフトウェアアプリケーションでは、動的リサンプリングがスイープサインやステップサインに使用されており、FFTのタイムブロックが正弦波の周波数に応じて動的な時間長を持つようになっています。固定 の代わりに、正弦波の周期数に等しい動的時間をFFTの時間ブロックサイズとして定義します。
モーダルテストの結果
FRF(周波数応答関数)
実験モーダルテストから得られる主な結果は、基準DOFとジオメトリ上のすべてのDOFとの間の周波数応答関数(FRF)です。
FRFは出力される応答運動と入力される加振力との関係を表す指標であり、リニアシステムの固有の性質を示します。
FRF値はFFTの周波数成分ごとに計算され、計測周波数範囲のFRF関数が得られます。
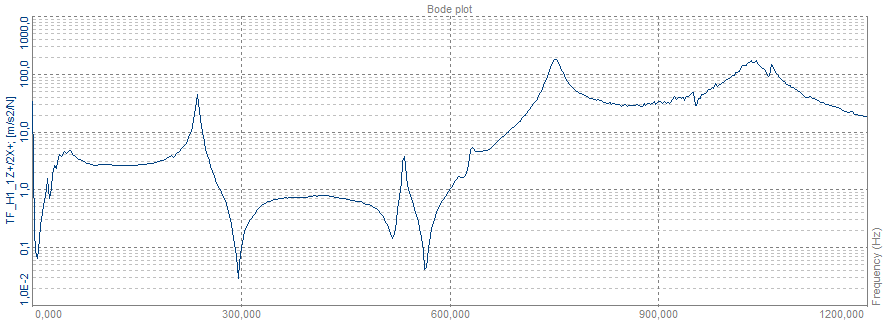
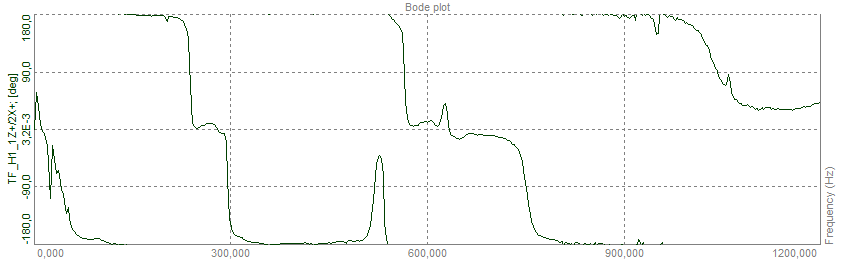
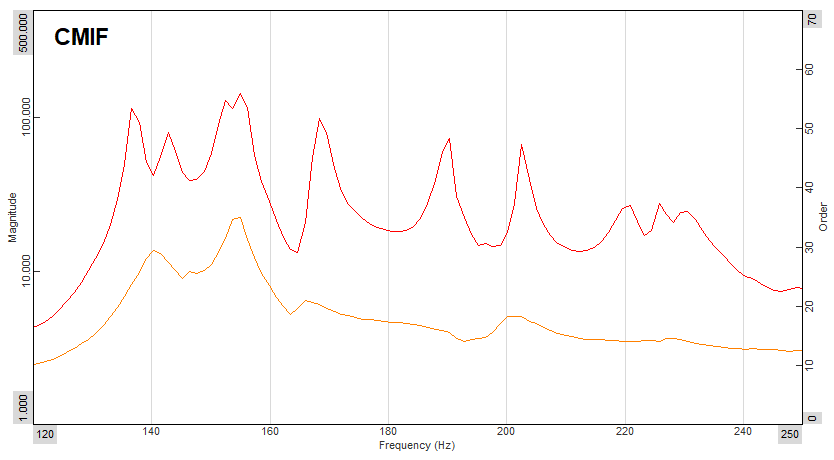
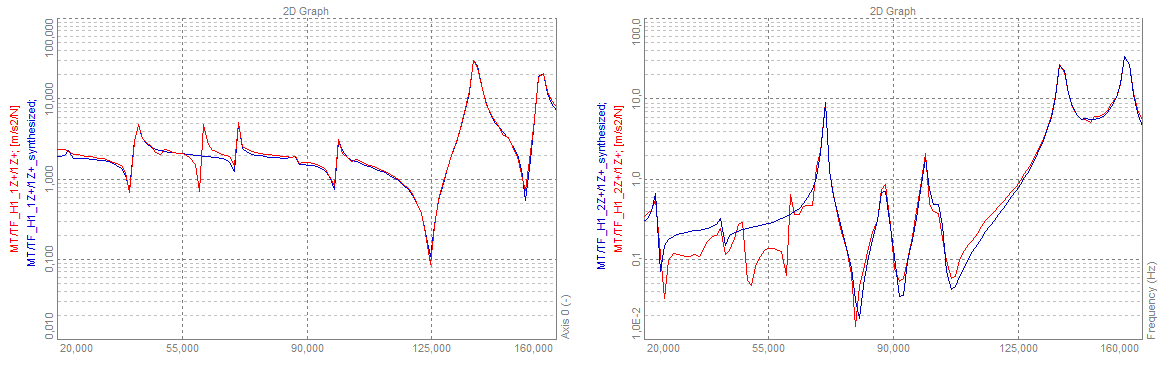
DOFとリファレンスDOFの間のFRFマグニチュード関数の例。
FRFの大きさは、多くの場合[ ]または[ ]の単位で表されます。FRFの大きさの値が大きい周波数では、構造体の感度が高くなり、低い入力力レベルでも出力応答が相対的に大きくなります。FRFの大きさが局所的に最大/ピークになり、その時点で位相が90度回転する場合は、通常は共振を示します。これは、コヒーレンスを検査することによって検証することができます。
一方、FRFの大きさの値が小さい周波数では、構造体は入力された力に対して耐性があり、入力された力が大きくても出力応答は比較的小さくなります。谷の位置は構造体の反共振周波数を示すことがよくあります。
基準となるDOFと他のDOFの間のFRF位相プロットの例。位相関係は共振周波数付近で変化します。
固有周波数,減衰,モードシェイプなどのモーダルモデルは、FRFデータに基づいているため、モーダルテストで得られた高品質なFRFデータは、モーダル解析を成功させるための基礎となります。
高品質なFRFデータを得るためには、以下のような方法があります。
比較的高い周波数分解能を使用することで、リーク効果を最小限に抑えることができます。これは、FFTの線間隔 が大きいため、FFTの時間ブロック長 を大きくすることで実現できます。
入出力信号のノイズは可能な限り少なくしてください。
無相関のノイズによる誤差を最小化するために、平均化 を行います。より多くのノイズが存在する場合は、より多くの平均値を使用してください。アプリケーションによってノイズレベルが異なるため、最適な平均値の数も異なります。
しかし、一般的な経験則では、加振機テストでは32~64の平均値を、ハンマー打撃テストでは4~8の平均値を使用します。
FRFの定式化
入力信号である と出力信号である の2つの信号があれば、FRFは次のように求められます。
ここで と は と の複合スペクトルです。スペクトルについては「付録 」をご覧ください。
FRF
FRFの 変量は、出力信号にノイズがある場合に結果の誤差を最小限にします。FRF は 関数の反共振の谷間で最も良い推定値となります。
そしてMIMOの場合:
繰り返しになりますが、 と および2x2 MIMO FRF H1の定式化については「付録 」をご覧ください。
FRF
FRFの バリアントは,入力信号にノイズがある場合に結果の誤差を最小にします。
FRF は、 関数の共鳴ピークにおいて最良の推定値を得ることができます。
そしてMIMOの場合:
の場合、共役されるのは出力信号bであることに注意してください。
ODS(操作上のたわみ形状)の結果
ODSの結果は、ジオメトリ上でアニメーション化されたたわみの形状と、決定された応答の振幅と位相情報で構成されており、これによりDUTの振動パターンが得られます。
特定の周波数における運用上のたわみ形状のアニメーション例(スペクトルODS)。赤色は最大たわみ量を示す。
応答振幅は、絶対的にスケーリングされた応答計測(例えば、スペクトルODSを行う際に、個々のDOFのオートスペクトル
から計算され、単位加速度,速度,および変位の両方で提供されることがあります。
スペクトルODSを行う際には、クロススペクトル やCPSD(クロスパワースペクトル密度)スペクトルなどから、基準となるDOFとすべてのDOFの間で位相情報を抽出します。
ODSはすべての周波数成分で決定することができますが、EMAテストによるモードシェイプは固有の周波数でのみ定義されることに注意してください。1つの固有周波数に近いODSは、その周波数におけるモードシェイプに支配されます。
DUTのモードシェイプがわずかな重なりでよく分離されている場合、ODSテストはEMAで推定されたモードシェイプと同様のたわみ形状を示すことができます。
モーダルテストの検証
コヒーレンス
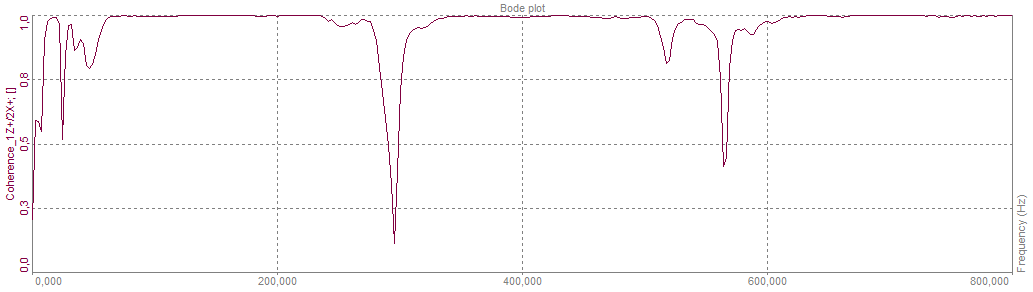
コヒーレンスデータは、モーダルテストの検証に重要な情報を提供します。コヒーレンスは、1つのDOFまたはDOFのグループが、他のDOFとどのように相関しているかを示します。コヒーレンス値はFFTの周波数成分ごとに計算され、計測された周波数範囲のコヒーレンス関数を提供します。
コヒーレンス機能は通常、品質検査のためのモーダルテストでモニターされます。
基準となるDOFと他のDOFの間のコヒーレンス関数の例。
一般的なコヒーレンス
一般的なコヒーレンス、あるいは単にコヒーレンスは、2つのDOF間のコヒーレンス計算です。
一般的なコヒーレンスは、シングルおよびマルチリファレンスモーダルテストの両方で使用されますが、マルチリファレンスモーダルテストでは、一般的なコヒーレンスはリファレンスDOF間でのみ使用する必要があります。
■シングルリファレンスモーダルテスト
シングルリファレンスDOFと他の個別DOFとの相関関係の検証
リファレンスDOFと他のDOFの間のコヒーレンス値は高い(1に近い)ことが望ましいです。これは、すべてのDOFの振動エネルギーが他のノイズ源ではなく、リファレンスDOFのみに関連していることが望ましいからです。一部の周波数でコヒーレンス値が低い場合、モーダルデータは不正確で、その周波数では無効になる可能性があります。しかし、反共振周波数や低周波の剛体振動では低い値でも許容される場合があります。
一般的にコヒーレンス値が低くなるのは、計測時のノイズやリーク、テスト対象物が時間的に変化する場合、非線形性が存在する場合などが考えられます。
■マルチリファレンスモーダルテスト
複数の加振器を使用している場合など、2つのリファレンスDOF間の相関性の検証
例えば、マルチシェーカーを用いたMIMOテストでは、2つのリファレンスDOF間のコヒーレンス値は、完全に無相関のリファレンス信号が望ましいため、低い値(0に近い値)にする必要があります。リファレンス信号が無相関である場合にのみ、リファレンスDOFを区別することができ、有効なMIMO FRFやその他のモーダルな結果を計算することができます。
2つの信号との間の一般的なコヒーレンスは、次のように定義されます。
ここで
1は2つの信号が完全に線形関係にあることを示し、0は相関がないことを示します。
コヒーレンスは、多くのブロックのデータを平均化することによってのみ有効となります。平均化しない場合、は1になります。
マルチプルコヒーレンス
マルチプルコヒーレンスとは、リファレンスDOFのグループと別のDOFとの間のコヒーレンスのことです。マルチリファレンスモーダルテストにのみ使用されます。
■マルチリファレンスモーダルテスト
すべてのリファレンスDOFと他の個別DOFとの間のマルチコヒーレンス値は、高い値(1に近い値)にする必要があります。これは、すべてのDOFの振動エネルギーがリファレンスDOFのみに関連し、他のノイズ源に影響されないことが望まれるからです。繰り返しになりますが、ある周波数でコヒーレンス値が低い場合、モーダルデータは不正確なものとなり、剛体振動や反共振を除いて、その周波数では無効となる可能性があります。
マルチプルコヒーレンスとは、信号グループと信号の間の線形関係を表す指標です。 マルチプルコヒーレンスは次のように定義されます。
ここで
ここで、1の値は、選択されたグループのすべての信号が信号に線形的に関係していることを示します。
0の値は、どの信号もに相関していないことを示します。
モーダル解析におすすめ製品
関連ページ

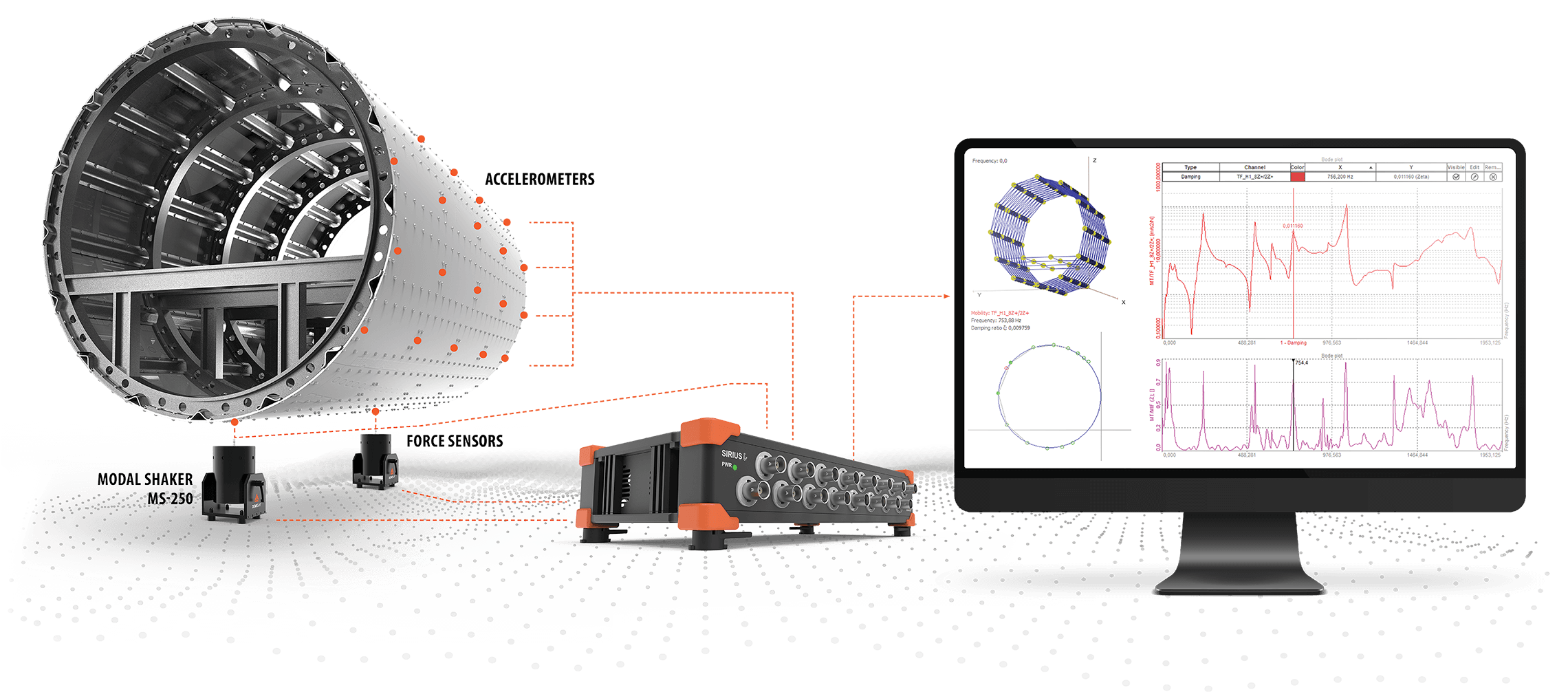 DAQシステムとシェーカーから加えられた入力の構造への影響を収録する力センサと加速度計を使用した
DAQシステムとシェーカーから加えられた入力の構造への影響を収録する力センサと加速度計を使用した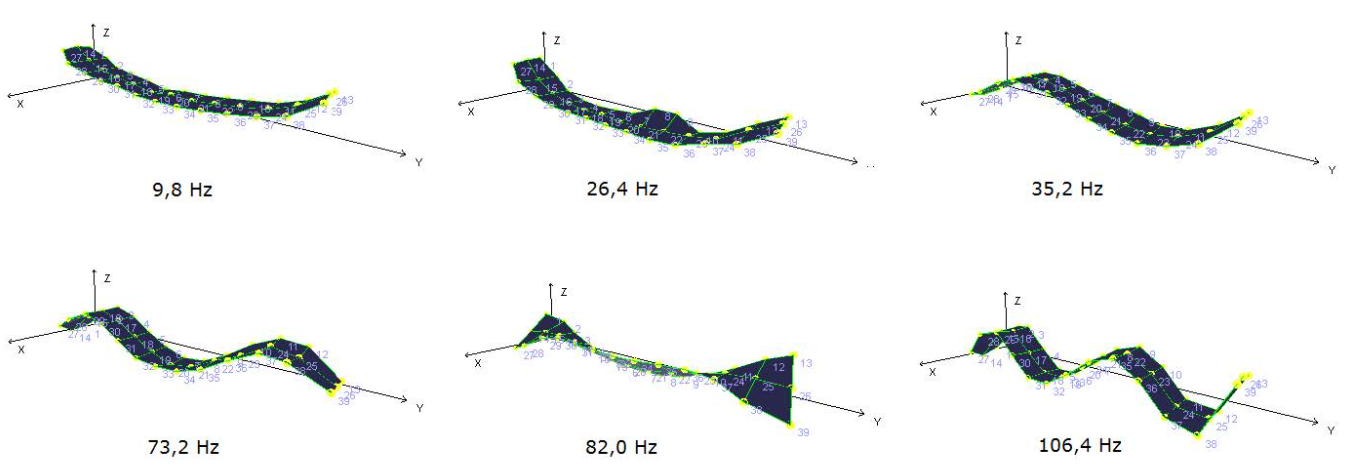 さまざまな共振周波数におけるプレート形状の構造的なモード形状(振動パターン)を示したもの
さまざまな共振周波数におけるプレート形状の構造的なモード形状(振動パターン)を示したもの