
ここでは、CANバス(Controller Area Network)およびその他の車両バスインタフェースについて説明します。
CANバスプロトコルとは何ですか?
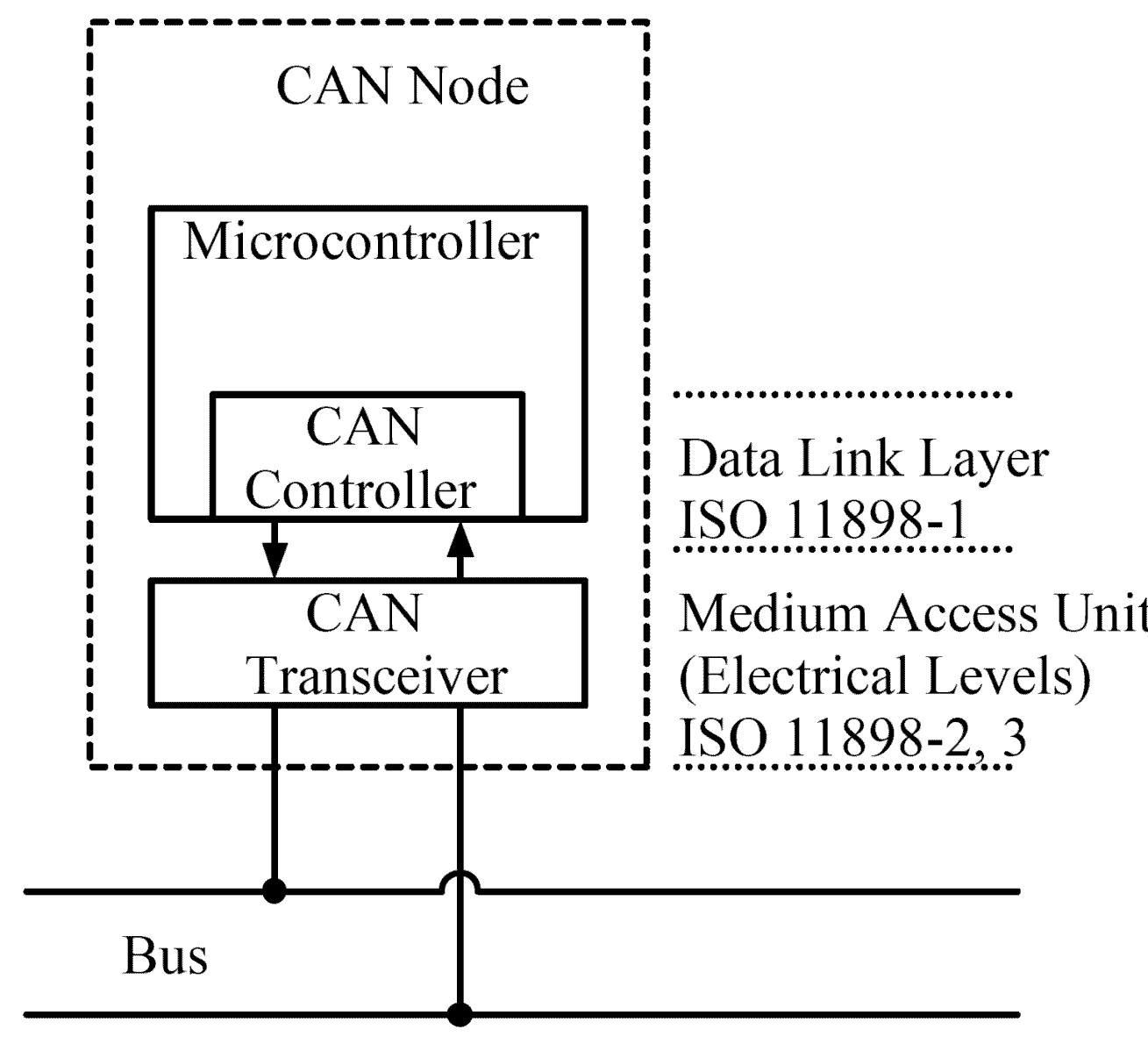
コントローラエリアネットワーク(Controller Area Network)- CANバスは、現在の自動車に搭載されている電子制御ユニット(ECU)やその他のデバイスが、信頼性の高い優先度に基づいた方法で通信できるように設計されたメッセージベースのプロトコルです。 メッセージまたは「フレーム」はネットワーク内のすべてのデバイスで受信され、ホストコンピュータは必要ありません。CANは、ISO11898に基づく豊富な国際規格でサポートされています。
 CANバスネットワークの概略図
CANバスネットワークの概略図
CAN FDとは何ですか?
CAN FDは、CANバスの「フレキシブルデータ(レート)(Flexible Data)」バージョンです。各メッセージの標準的な長さは800%増加の64バイトで、同様に最大データレートは1Mbpsから8Mbpsに向上しています。「柔軟性」とは、ECUがリアルタイムな要求に応じて動的に伝送速度を変更したり、メッセージサイズを大きくしたり小さくしたりできることです。
このような進化にもかかわらず、CAN FDは標準的なCAN 2.0と下位互換性を保っています。
現在、CAN FDは非常に高性能な車両に搭載されていますが、最終的には全てあるいはほとんどの車両に移行すると予想されます。
CANを含む車両データバスに関しては、以下のビデオをご覧ください。
【動画】Dewesoftによる車両バスシステムの収録と解析
CANバスの利点
CANバス規格は広く受け入れられており、事実上すべての車両と多くの機械で使用されています。これは主に以下のような利点があるためです。
- シンプルで低コスト:ECUの通信は複雑なアナログ信号線を直接経由せず、単一のCANシステムで行われるため、エラー,重量,配線,コストの削減が可能です。CANチップセットは簡単に入手でき、価格も手ごろです。
- 完全な集中化:CANバスは、すべてのネットワークECUと通信するための1つの入口を提供し、集中的な診断,データロギング,構成を可能にします。
- 極めて高い堅牢性:電気的な障害や電磁波の影響を受けにくいため、車両などの安全性が重要なアプリケーションに最適です。
- 効率的:CANフレームはID番号によって、優先順位が付けられます。優先順位の高いデータは、他のフレームに影響を与えることなく、すぐにバスにアクセスすることができます。
- 車体重量の軽減:数kmにも及ぶ絶縁された重たい電線とその重量を車両から排除します。
- 簡単な導入:豊富なサポートエコシステムを備えた実証済みの規格。
- EMI対策:CANは車両などの重要なアプリケーションに最適です。
CANには優れた制御機能と障害検出機能があります。エラーを検出しやすいので、送信データを必要な場所に届けることができます。
複雑なシステムの分散制御が必要な場合に最適なプロトコルです。重たい配線を減らすことで、コストと重量を削減できます。チップのコストが低くプロトコルのすっきりとした設計により、CANの実装が比較的簡単です。
CANを使用するもう1つの利点は、最初の2つの層(物理層とデータリンク層)が安価なマイクロチップに実装されており、いくつかの構成で利用できることです。
代表的なCANバスアプリケーション
現在、CANのアプリケーションは自動車とオートモーティブの世界が中心となっていますが、それだけではありません。CANは事実上すべての業界で使用されおり、使用されているCANプロトコルは次の場所で確認できます。
- あらゆる種類の車両:オートバイ,自動車,トラック...
- 大型車用テレマティクス
- 飛行機
- エレベータ
- 各種製造工場
- 船
- 医療機器
- 予知保全システム
- 洗濯機,乾燥機,その他家電製品
CANバスの簡単な歴史
家の中でスイッチを押して電気をつけると、スイッチを通して電気が照明に流れます。そのため、スイッチや配線は予想される最大電流を処理できるような重さと絶縁が必要です。家の壁には、この重くて絶縁された配線がぎっしり詰まっています。
かつては車やトラックも、まったく同じ方法で配線されていました。1915年にヘンリーフォードが車にライトと電気ホーンを追加するというアイデアを思いついたときから、電気はバッテリからスイッチを通していろいろなデバイスに流れていました。1960 年代までには、すべての車両に数千本の太いワイヤが張り巡らされていました。重量が少しでも増えると、車両の燃費が低下します。
1970年代の石油禁輸に続いて、自動車メーカに燃費を改善するよう圧力が高まっていました。
そこで彼らは車の重量を減らす方法を探し始めました。
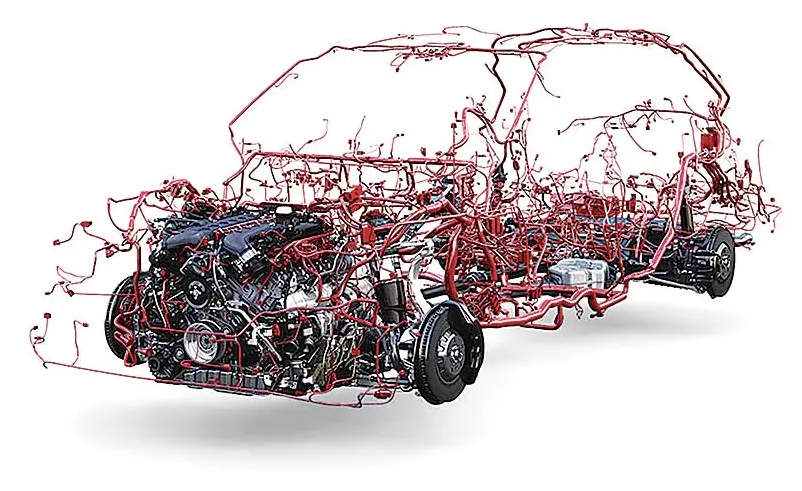 乗用車の一般的な電気配線
乗用車の一般的な電気配線
画像提供:Transparency Market Research
1980年代初頭には、自動車内部に搭載されるECU(電子制御ユニット)がますます増え、ドイツのロバート・ボッシュ社などでは、複数のECUと車両システム間の通信システムとして使用できるバス通信システムを模索していました。 彼らは市場を検索しましたが必要なものが見つからなかったため、自動車メーカのメルセデス・ベンツ、半導体メーカのインテル®、ドイツのいくつかの大学と共同で「コントローラー・エリア・ネットワーク」の開発を開始しました。
1986年ボッシュはデトロイトで開催されたSAEコングレスでCAN規格を発表しました。その1年後、インテル社が最初のCANコントローラチップの出荷を開始し、自動車の世界は一変しました。振り返ってみると、CANの開発による軽量化は、幸運にも副産物として得られたものでした。
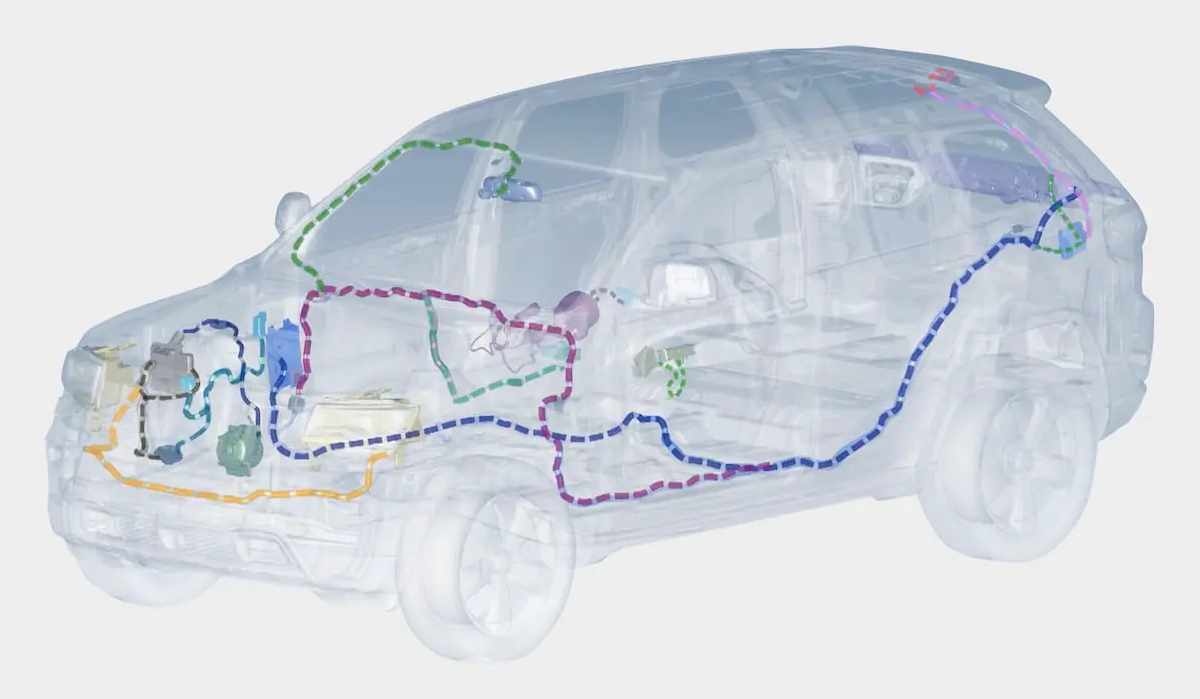 現在の自動車やトラックでは、重いケーブルが軽量な2線式CANに置き換えられています
現在の自動車やトラックでは、重いケーブルが軽量な2線式CANに置き換えられています
CANメッセージングはどのように機能しますか?
CANバス上のデバイスは「ノード」と呼ばれます。各ノードは、CPU,CANコントローラ,トランシーバで構成され、ノードが送受信するデータ両方の信号レベルを調整します。すべてのノードはデータを送受信できますが、同時に受信することはできません。
ノードは相互に直接データを送信できません。代わりにデータをネットワークに送信し、アドレス指定されているすべてのノードでデータを利用できます。CANプロトコルはロスが無く、バス上の競合を解決するためにビット単位のアービトレーション方式を採用しています。
すべてのノードが同期されているため、ネットワーク上のデータを同時にサンプリングします。ただし、データはクロック(時間)データで伝送されないので、CANはEtherCATのような真の同期バスではありません。
CANでは全てのデータがフレームで送信され、次の4つのタイプがあります。
- データフレームは1つまたは複数のレシーバノードにデータを転送
- リモートフレームは他のノードからのデータを要求
- エラーフレームはエラーを報告
- 過負荷フレームは過負荷状態を報告
メッセージの長さには、標準と拡張の2つのバリエーションがあります。違いは、アービトレーションフィールドに18ビットの識別子が追加されていることです。
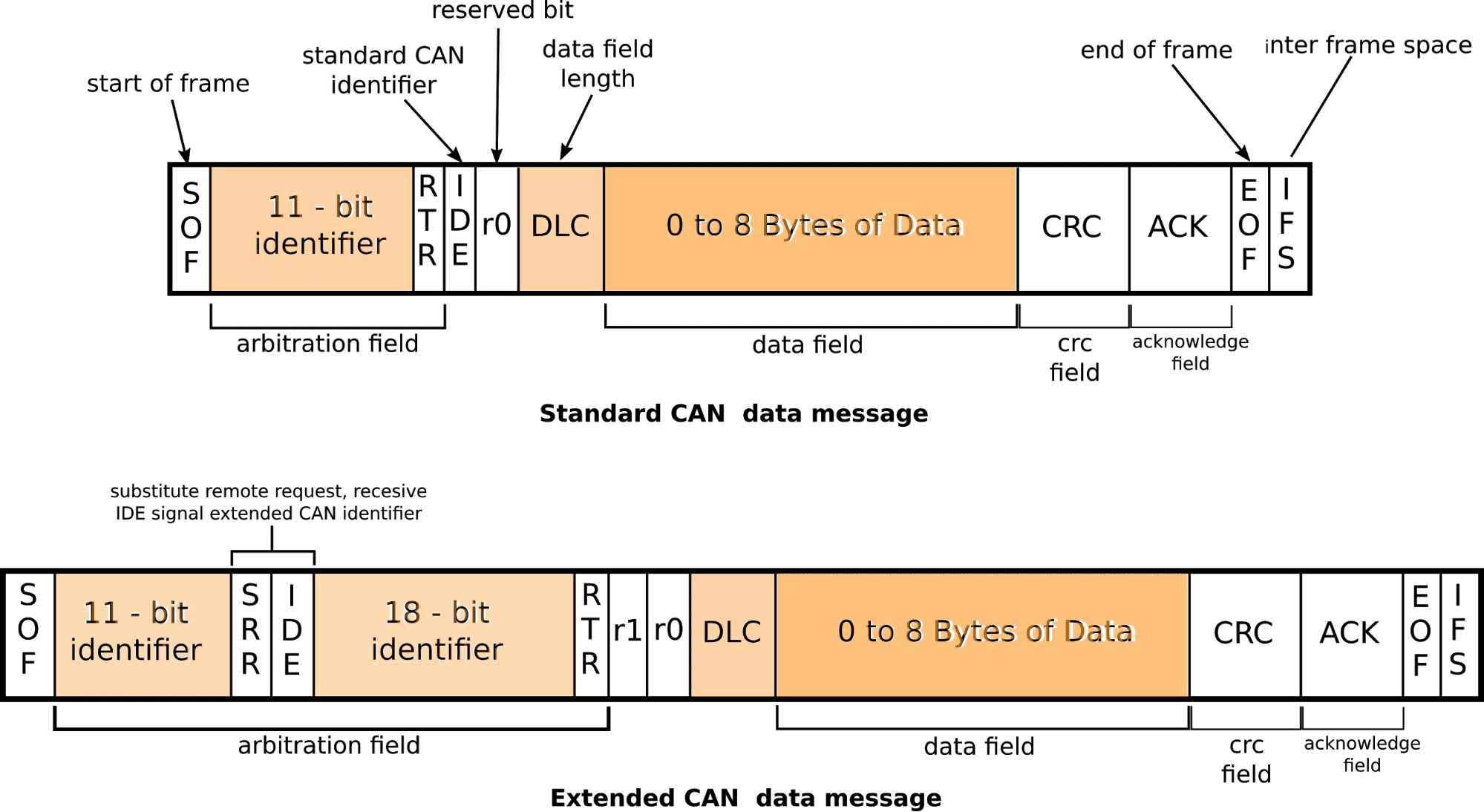 CANデータメッセージアーキテクチャの標準および拡張フレーム
CANデータメッセージアーキテクチャの標準および拡張フレーム
CANデータメッセージ構造(CANフレーム)
| フィールド | ビット | 説明 |
|---|---|---|
| SOF | 1 | 単一の支配的なフレームの開始。このビットは、メッセージの開始を示します。 アイドル期間後にノードを同期します。 |
| 識別子 (Identifier) |
11 | CAN 11ビット識別子データフィールドは、メッセージの優先度を設定します。 値が小さいほど、優先度が高くなります。 |
| RTR | 1 | リモート送信リクエスト。他のノードから情報が要求された場合に優位になります。 すべてのノードがリクエストを受信しますが、識別子が目的のノードを決定します。 |
| IDE | 1 | 識別子拡張ビットは、標準のCAN識別子(拡張されたものではない)が送信されていることを示します。 |
| R0 | 1 | 将来の使用に備えて予約されています。 |
| DLC | 4 | データ長コードには、送信のバイト数が含まれています。 |
| データ | 0-64 | 送信される実際のデータ。 |
| CRC | 16 | 16ビット(115ビットと区切り文字)の巡回冗長検査(CRC)には、送信エラー検出のため、先行するアプリケーションデータのチェックサム(送信ビット数)が含まれます。 |
| ACK | 2 | ノードがメッセージを正常に受信した場合、ACKはこのビットを優位なビットで上書きすることによってすぐに登録します。一方、ノードがメッセージにエラーを検出した場合、ノードはこのビットを劣性のままにして、メッセージを無視します。ACKスロットとACK区切り文字はそれぞれ1ビット長です。 |
| EOF | 7 | End Of Frameは、すべてのCANフレーム(メッセージ)の終わりを示す7ビットのフィールドです。 |
| IFS | 3+ | フレーム間スペース(IFS)は、コントローラがフレーム(メッセージ)をバッファ領域内の所定の位置に移動させるために必要な時間です。IFSには少なくとも3つの連続するリセッシブ(1)ビットが含まれていることに注意してください。劣性ビットが3つ経過した後、優位ビットが検出されると、次のフレームのSOFビットになります。 |
アービトレーションフィールドには、メッセージ識別番号とリモート送信要求ビットが含まれます。重要なメッセージのID番号は低くなります。
複数のノードが同時に送信する場合、同時にアービトレーションを開始します。メッセージID番号が最も小さいノードが優先されます。優性ビットはCANバスの劣性ビットを上書きします。
メッセージ識別子は、11ビット(標準CAN、2048種類のメッセージ識別子)または29ビット(拡張CAN、5億3700万種類のメッセージ識別子)の長さを持つことができます。リモート送信要求ビットは優位で、データ送信中であることを示します。
多くのシステムでは、論理 1 はハイ、論理 0 はローを表します。しかしCAN バスでは、これは逆です。そのためCANトランシーバは通常、ドライバ入力とレシーバ出力にプルアップを使用し、デバイスがデフォルトで劣性バスの状態になるようにしています。
CANバスのバリエーション
ISO 11898規格は、CANのいくつかのバージョンを定義しています。自動車業界で使用される主なCANタイプは次のとおりです。
低速CAN
高い更新レートを必要としない障害-耐性システムで使用されます。最大データ転送レートは125kbpsですが、その分配線は高速CANよりも経済的です。車載用途では、診断,ダッシュボードの制御や表示,パワーウィンドウなどに使用されます。
高速CAN
早い更新レートと高精度が要求される重要なサブシステム(アンチロックブレーキシステム,横滑り防止装置,エアバッグ,エンジン制御ユニットなど)間の通信に使用されます。高速CANのデータ転送速度は、1kビット/秒から1Mビット/秒の範囲です。
新しい車載アプリケーションの帯域要求は年々高まっているため、自動車OEMは現在CAN FDを新車に搭載しています。
CAN FD(フレキシブルデータレートCAN)
CANの最新バージョンでは、柔軟なデータレート,メッセージあたりのデータ量,高速転送が導入されています。CANの標準(低速・高速)メッセージのデータ長は8バイトですが、CAN FDでは800%増加の64バイトのデータになります。また、最大データレートも1Mbpsから8Mbpsと飛躍的に向上しました。
 CAN FD データフレームフォーマット
CAN FD データフレームフォーマット
CAN FDは下位互換性もあり、CAN 2.0通信プロトコルと、CAN出力が読み取り専用として使用されるSAEJ1939などの特別なプロトコルをサポートします。CAN FDは、基本的にISO 11898-1で指定されている元のCAN規格の拡張であり、従来のCANシステムと完全に互換性があります。
CAN FDは、ECUがリアルタイムな要求に応じて伝送速度を動的に変更し、メッセージサイズの大小を選択できるようにするための重要なステップです。現在、CAN FDは高性能車に搭載されていますが、ECUの性能向上とCAN FDハードウェアのコスト低減により、ほぼすべての車両に搭載されるのは時間の問題です。
SIRIUSシリーズ(R1,R2,R3,R4,R8,R8rtなどのSIRIUSベースの機器),DEWE-43A,MINITAURなど多くのDEWESoft製品には低速/高速CANバスインタフェースが組み込まれています。これらのモデルは、すべてCANバスを1つ搭載しています(DEWE-43Aは2つ搭載)。CANバスインタフェースは、1ポート,2ポート,4ポート,8ポートの用意もあり、どのDEWESoftシステムにも追加が可能です。
 CANバスインタフェースは、ほぼすべてのDEWESoftDAQシステムで利用できます。
CANバスインタフェースは、ほぼすべてのDEWESoftDAQシステムで利用できます。
CAN FDが必要な場合、KRYPTONi-1xCAN-FDはEtherCATをデータインタフェースとして使用するシングルポートCAN FDデバイスです。最大8Mbpsのデータレートの高速CANインタフェースをサポートしています。 また、CAN FDはCAN2.0通信プロトコルに加え、J1939のようなCA出力を読み取り専用として使用する特殊プロトコルもサポートしています。KRYPTONi-1xCAN-FDは、ガルバニック絶縁された通信ラインと絶縁された+5Vと+12Vのセンササプライを使用しています。センサ電源の電力制限は1.4Wです。
 EtherCATインタフェースを備えた堅牢で防水性のあるKRYPTONi-1xCAN-FD
EtherCATインタフェースを備えた堅牢で防水性のあるKRYPTONi-1xCAN-FD
この非常に小さなCAN FDモジュールは、SIRIUSシリーズやKRYPTONシリーズを含むEtherCATポートを持つすべてのDEWESoft DAQ機器に追加することが可能です。
関連ページ
追加のCAN標準とプロトコル
なぜ、CAN上にさらなる標準やプロトコルが必要なのでしょうか? 理由は簡単、CANがエレガントで信頼性の高いプロトコルだから、それだけです。これはメッセージングシステムですが、メッセージ内のデータを解析したり理解する方法は含まれていません。そのためいくつかの企業は、CAN内またはCAN上で動作する追加の標準やプロトコルを作成し追加機能を提供しています。
その代表的なものは、以下の通りです。
CAN上のSAE J1939
SAE J1939プロトコルは、もともと米国の大型トラックやトラクタートレーラーリグで使用するために開発されました。現在それは世界中のディーゼルエンジンメーカで使用されています。J1939はCAN物理層で実行される高レベルのプロトコルです。18輪トラックなどの大型トラックに固有の便利な機能をいくつか提供します。
 CAN回路図のSAE
CAN回路図のSAE
プロトコルにはメッセージ識別子を29ビットに制限したり、バス速度を250または500 kbpsに制限したりするなど、可能な限り最高の信頼性を促進するために意図的に設定されたいくつかの制限があります。
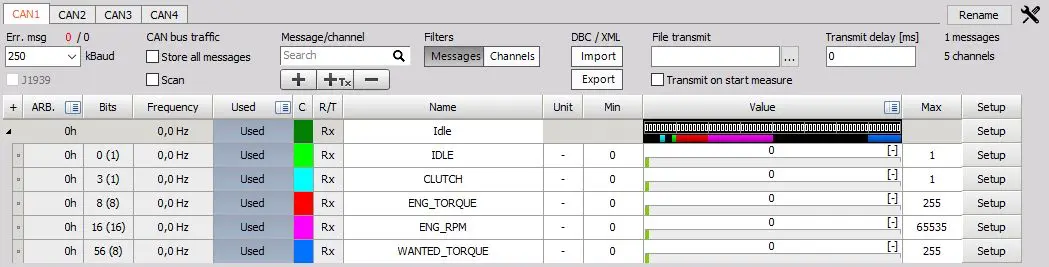 DewesoftXのCANバス設定画面。左上近くのJ1939チェックボックスに注目してください
DewesoftXのCANバス設定画面。左上近くのJ1939チェックボックスに注目してください
DewesoftXを使用すると、使用可能なCANポートのCANセットアップ画面のチェックボックスを使用してJ1939デコードを選択できます。もちろん、これはCANバス上のメッセージがJ1939標準に従ってフォーマットされていることを前提としています。データメッセージは、拡張CAN標準と同じ長さです。
アービトレーションフィールドには追加の送信元アドレスと宛先アドレスが含まれ、ボーレートは使用されているJ1939標準バージョンに応じて250kbpsまたは500kbpsに制限されます。J1939は、標準のDewesoftX CAN設定画面で選択したものです。追加のハードウェアやソフトウェアは必要ありません。
関連ページ
OBD II(OBD2)
このオンボード診断ポートは、1989年以降に製造されたすべての車に搭載されています。通常、ステアリングホイールから2フィート(0.61メートル)以内にあり、16ピンのコネクタにスキャンツールを接続することで、自動車修理工場や車の所有者が車の問題を診断できるようにするインタフェースです。
(写真は2016年トヨタ4Runnerのステアリングホイール下)
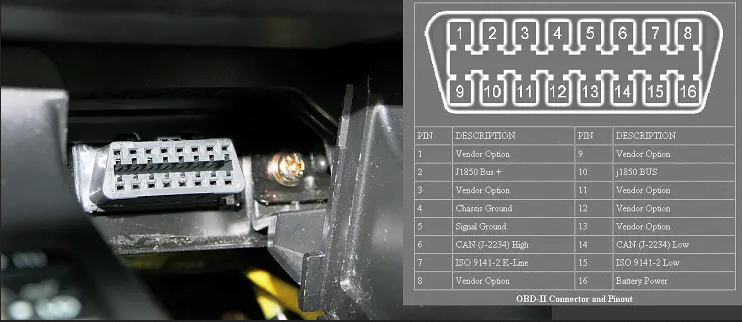 車両のOBDIIコネクタ
車両のOBDIIコネクタ
スキャンツールは、車両から報告されたDTC(診断トラブルコード)を読み取ることができます。OBD IIインタフェースは、RPM,車速,冷却水温度など数十チャネルのリアルタイムデータを伝送するために必要です。DEWESoftのCANインタフェースは、このOBD IIコネクタに下図のように接続することができ、記録中の他のデータと同期して、これらのチャネルのいずれかまたはすべてを読み出し、表示し、記録することができます。
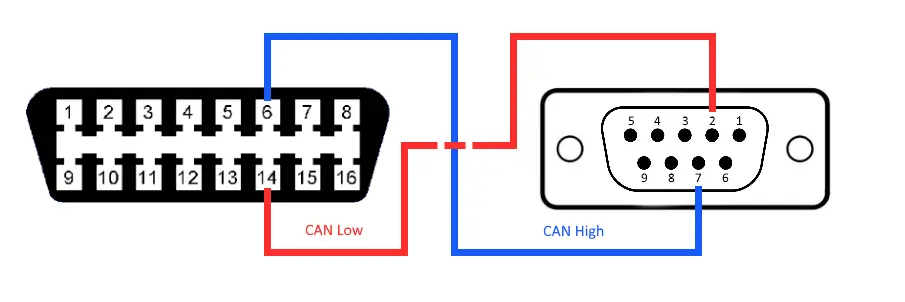 DEWESoft CANインタフェースコネクタ(右)に接続されたOBD IIコネクタ(左)
DEWESoft CANインタフェースコネクタ(右)に接続されたOBD IIコネクタ(左)
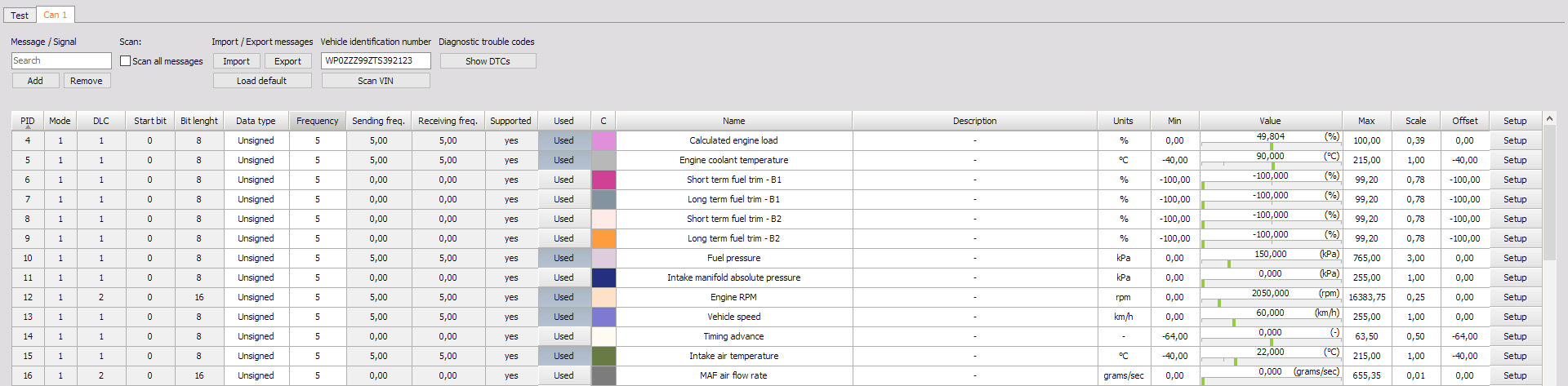 DewesoftXのODBIIセットアップ画面の一部
DewesoftXのODBIIセットアップ画面の一部
DewesoftシステムでOBDIIメッセージのデコード,表示,記録をするには、追加のODBIIソフトウェアプラグインが必要です。このシステムでは、DTC(診断トラブルコード)をスキャンしたりその他多くのことが可能です。
CANおよびEthernet上のXCP/CCP
ユニバーサル計測およびキャリブレーションプロトコル(XCP)は、ECUをキャリブレーションシステムに接続するために設計されました。名前の「ユニバーサル」は、CANバス,CAN-FD,FlexRay,
Ethernetなどで実行できることを指しています。これは、1990年代に開発されたオリジナルのCANキャリブレーションプロトコル(CCP)の後継です。
DEWESoftは、DewesoftXで動作するXCP/CCPマスタおよびXCP/CCPスレーブプラグインを通じて、XCP/CCPプロトコルをサポートしています。標準的なDewesoft CAN(およびEthernet)インタフェースハードウェアを使用することができます。
【動画】DEWESoftのXCPデータ収録およびXCPデータロガー
これらのXCPスレーブおよびマスタプラグインに加えて、SIRIUS-XHSおよびIOLITE LXデータ収録システムは、追加のソフトウェアなしでEthernet上のXCPを通してネイティブにデータを提供できます。詳細については上の短い紹介ビデオをご覧ください。
関連ページ
CANopen
CANopenは、組み込み制御アプリケーションに使用される上位レイヤのプロトコルです。CANメッセージングプロトコルをベースにしているため、CANデータの読み取りや記録が可能なDAQシステムやデータロガーは、CANopenからのデータにもアクセスすることができます。
モーションコントロールシステムにおいて、デバイス間の相互運用性を容易にするために開発されました。デバイス間およびデバイス間の通信を高レベルで実装し、機器設定もサポートします。モーションコントロール,ロボット工学,モータ制御などのアプリケーションで頻繁に使用されます。
国際機関CAN in Automation-CiAによって管理されています。1992年にドイツで設立されたCiAは、CANの非営利の国際的なユーザ/メーカグループです。彼らは、CANプロトコルの開発とCANテクノロジのイメージアップための公平なプラットフォームであることに誇りを持っています。
CANopenは、次のようなさらにいくつかのコンセプトを提供しています。
3つの基本的なコミュニケーションモデル
- マスタ/スレーブ:1つのノードが「マスタ」であり、他のすべてのノードがスレーブ
- クライアント/サーバ:マスタ/スレーブに似ているが、クライアントノードへの要求に応じてデータを送信するサーバである点が異なる
- プロデューサ/コンシューマ:あるノードが特定の種類のデータを自動生成するように構成され、他のノードがそれを消費するように構成されている
2つの基本的な通信プロトコル
- ノード構成のためのSDO
- リアルタイムデータを送信するためのPDO
デバイスプロファイル
- CiA 401 入力/出力モジュール
- CiA 402 ベンダーの独立性を高めるモーションコントロール
オブジェクトディクショナリ
ネットワーク上のデバイスごとにOD(オブジェクトディクショナリ)があります。
ODには、ネットワーク上の各デバイス構成を定義するデータの標準構成があります。
デバイスの状態
マスタノードは、ネットワーク上のデバイスの状態を変更またはリセットすることができます。
電子データシート(EDS)
EDSはODエントリの標準ファイル形式です。たとえばサービスツールでデバイスを更新できます。
 CANopenの概念と機能間の接続
CANopenの概念と機能間の接続
関連する通信バス
前のセクションで説明したCANとその上で実行されるプロトコルに加えて、車両アプリケーションに使用される他の通信バスがあります。
現在の車両は、複数のデータバスを組み合わせて使用しています。これらを見て、CANバスと比較してみましょう。
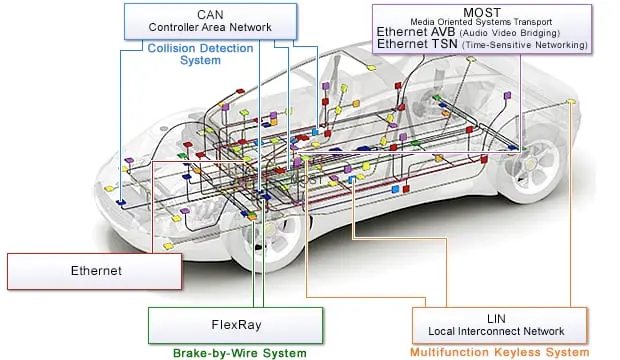 現在の車両で使用されている複数のバス
現在の車両で使用されている複数のバス
Image © 2020 Renesas Electronics Corporation
MOST(メディア指向システムトランスポート)
誰もが新しい車は以前の車よりも優れた、より高性能なエンタテインメントシステムを備えていることを期待しています。50年以上前から標準装備されていた昔ながらのAM/FMラジオは、カセットテープや8トラックテープの時代から、コンパクトディスク(CD)やリムーバブルフラッシュメディアに対応できるように変化してきました。 現在では、衛星ラジオ(北米ではSIRIUS/XM®(シリウスXMラジオ))に加え、モバイル機器からのストリーミングコンテンツに重点を置いています。
 MOSTバス-メディア指向システムトランスポート
MOSTバス-メディア指向システムトランスポート
画像提供:Pixabay
MOST(Media-Oriented Systems Transport)は、MOST Cooperationと呼ばれる自動車メーカのパートナーシップによって開発された、車両エンタテインメントおよび情報システムを相互接続するための標準バスです。25,50,150Mb/sのデータレートを提供します。ただし、これらはバス上の全ノードで分割される集計レートであることに注意してください。
MOSTは世界中のほぼすべての自動車ブランドで使用されています。最大64台のデバイスをMOSTリングネットワークに接続できるため、デバイスを簡単に接続または切断できます。その他バーチャルスターなどのトポロジーも可能です。MOSTには、次のようなさまざまなバージョンがあります。
- MOST25は、23MBの最大ストリーミングレートを提供しますが、プロトコルのオーバーヘッドやその他の制限により、実際には約10 kB/sに制限されています。
- MOST50は、MOST25の帯域幅を2倍にします。
- MOST150は、MOST50の帯域幅を3倍にし、Ethernetを物理層に追加できます。
MOSTは、以下で説明する車載用Ethernetとの競争激化に直面しています。
車載用Ethernet
運転支援機能や自動運転/自動走行車などの新しいテクノロジは、機能を発揮するためにますます高い帯域幅を必要とします。このようなスピードの要求と、Ethernetハードウェアの低価格化が、自動車メーカに車載用Ethernetを普及させる大きな要因になっています。車載用Ethernetのその他の刺激としては、LIDARなどのセンサ,カメラの生データ,GPSデータ,地図データ,より高解像度なフラットスクリーンディスプレイに必要な転送速度などがあります。
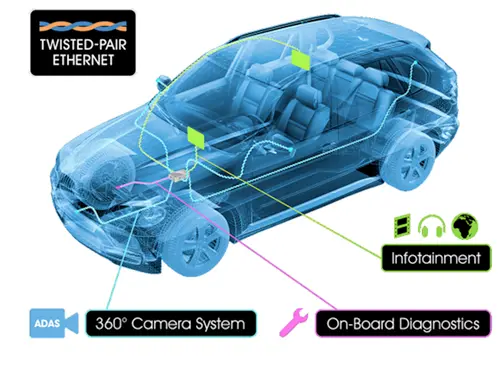 車載用Ethernet
車載用Ethernet
Image © 2017 OPEN Alliance SIG
しかし私たちの快適な家庭やオフィス環境とは異なり、車両ははるかに広範囲の温度,衝撃,継続的な振動にさらされます。さらに重要なデータ、特に運転支援や衝突回避に関連するデータに支障が出ないよう、EMIやRFIをブロックする必要があります。
「車載用Ethernet」という用語は特定の規格自体を指すものではありません。これには、車両内で使用されるEthernetベースのネットワークが含まれます。また、Broadcom社が開発したOPEN Alliance BroadR-Reach規格や、IEEE 802.3bw-2015(別名100Base-T1)を指す意味もあります。
Ethernetは高速で世界的に普及しているにもかかわらず、近年まで自動車の診断アプリケーション、つまり自動車が整備中で動いていない時にしか使われていませんでした。なぜでしょう?
EMI(電磁干渉)やRFI(無線周波数干渉)の影響を受けやすいこと、固有の確定時刻同期がないこと、振動でコネクタが故障しやすいことなどが理由です。たとえば、標準的なCAT5コネクタは、通常の使用では自動車では耐えられません。
しかし、これらの問題はIEEE 802.3および802.1ワーキンググループによって対処されています。
一方チップメーカのBroadcomは、Ethernet技術を自動車用に適合させるBroadR-Reach™を開発しました。BroadR-Reachは、最大15mまたはケーブルにシールドを追加した場合は最大40mの非シールドのツイストペアケーブルを使用して、100 Mb/sの速度を提供します。
 BroadR-Reach 車載用Ethernetトポロジ。BroadcomのPHYチップは、データを同時に双方向で送受信します。
BroadR-Reach 車載用Ethernetトポロジ。BroadcomのPHYチップは、データを同時に双方向で送受信します。
BroadR-Reachは、一部の自動車メーカでインフォテインメントシステム,運転支援,車載診断,さらにはADASのアプリケーションに採用されています。1ポートあたり100Mbpsのデータレートを実現し、例えばMOSTの150Mbpsの集約レートを大きく上回っています。
BroadR-Reach規格は、車載用Ethernetの採用を提唱するOPEN (One-Pair Ether-Net) Allianceが統括しています。
Ethernet AVB(Audio Video Bridging)は、IEEE標準 AVB1.0です。カメラやマルチメディアシステムでの採用が進んでいます。AVB2.0は、車両制御アプリケーションを対象としています。AVBは、AVnu Allianceによって推進されています。
Ethernet TSN (Time-Sensitive Networking) は、標準的なEthernetで確定的なメッセージングを可能にするように設計されたIEEE 802.1規格です。TSNはプロトコルではなく、Ethernet OSIのレイヤ2、つまりデータ層で実装される規格です(AVBもレイヤ2の規格です)。
TSNは前述のEthernet AVBの拡張として、自動運転車アプリケーションに必要な時間同期,スケジューリング,パケットシェーピングに特化したものです。「時間」に焦点を当てているので、デバイス間で時間の概念を共有するためにPTP(Precision Time Protocol)のIEEE 802.1ASとIEEE 802.1ASRev が選ばれています。
Gartnerによると、2017年には消費者向け車両に合計1,930万個のEthernetポートが設置されました。2020年までにこれは1億2280万に増加し、その数は2023年までに2倍になると予測されています。
SENT SAE-J2716
SENT SAE-J2716(Single Edge Nibble Transmission)は、CANまたはLINに代わる低コストのプロトコルとして設計されました。これはセンサがデータをECUに送信できるようにする一方向の伝送プロトコルです。
データはパルス符号変調(PCM)を使用してエンコードされ、単線で送信されます。信号、アース、電源の合計3本のワイヤーがあります。データは4ビットの「ニブル」でエンコードされます。
データはPCM(Pulse Code Modulation)を使用してエンコードされ、単線で送信されます。信号,グランド,電源の計3本の配線があります。データは4ビットの "ニブル "でエンコードされます。
一般的なSENTメッセージは32ビット(8ニブル)で、次のもので構成されます。
- 信号データ:24ビット(6ニブル)
- 信号データ:24ビット(6ニブル)
- ステータス情報:4ビット(1ニブル)
 SAE-J2716 メッセージフレーム
SAE-J2716 メッセージフレーム
また、データが12ビット(3ニブル)のみで、20ビット(5ニブル)のメッセージを構成することも可能です。
変調されたデータ設計により、SENTは電気的ノイズの多い環境での使用に最適です。
DEWESoftシステムは、センサから送信されるSENT信号を読み取るためにカウンタチャネルを使用して、SENT SAE-J2716データをサポートしています。高速な2チャネルと、任意の数の低速なチャネルを自動検出することができます。複数のモジュールウィンドウを追加することで、各センサが異なるカウンタを使用している場合、複数のセンサからのSENT信号を同時にデコードすることができます。SENTチャネルはDEWESoftのチャンネルとして利用可能です。
FlexRAY
FlexRAYは、シャーシ制御などの動的な車載アプリケーションに使用されるプロトコルです。2005年にFlexRAY Consortiumによって作成されましたが、その後ISO17458-1~17458-5で標準化されました。
FlexRAYは、1本または2本の非シールド型ツイストペアケーブルでデータを転送します。10Mbpsで動作し1 線式または 2 線式構成に対応しています。バス型,スター型,ハイブリッド型のネットワークトポロジをサポートし、最大10Mbpsの速度で動作します。 差動信号のためコストと重量がかさむシールドケーブルが不要で、ノイズを低く抑えることができます。
CANと同様FlexRAYバスに同時に書き込むことができるノードは1つだけです。CANはアービトレーション ビットを使用して、どのデータが優先され処理を続行できるかを決定します。一方、FlexRAYはTDMA(Time Division Multiple Access)方式を採用しており、時刻同期された各ノードがメッセージを送信する順番を待つ必要があります。これにより衝突を回避しバス全体のデータレートが高くなるため、データのスループットを向上させることができます。
FlexRAYは、LINやCANと共通の従来のマルチドロップ型トポロジで実装されることが多いですが、スター型トポロジで構成することもできます。スター型トポロジは、配線障害が複数のノードに影響を与えないという利点があります。また、FlexRAYは以下のような混合トポロジでの実装も可能です。
 ネットワークトポロジ
ネットワークトポロジ
左:マルチドロップ型、中央:スター型、右:混合
FlexRAYは、高性能なパワートレイン,セーフティ,アクティブシャーシコントロールなどの用途に多く使用されています。FlexRAYはCANバス実装に比べ高価です。
しかし、2本1組のパラレルデータラインを使用することで、1本が故障しても2本目が引き継ぐという冗長性を確保することができます。これはステアリングやブレーキなどのミッションクリティカルなアプリケーションでは重要です。ミッションクリティカルでないFlexRAYアプリケーションでは、通常単一のツイストペアを使用します。
DEWESoftシステムでは、FIBEXライブラリインポートオプションを使用して、FlexRAYデータを簡単に収録することができます。すべてのベクターFlexRayインタフェースカードに対応するソフトウェアプラグインを用意しています。
LINバス-ローカル相互接続ネットワーク
LINバスはCANバスに代わる安価なバスです。非常にシンプルですが必然的にマスタ1ノード、スレーブ15ノードに制限されます。LINはシリアルな一方向のメッセージングシステムで、スレーブは自分宛のメッセージ識別子を聞いています。
LINは帯域幅が狭くノード数の制限もあるため、通常は小型の電気モータや制御装置の制御に使用されます。データレートは19.2kbpsまたは20kbpsに制限されています。
 メルセデスベンツの調節可能なチャイルドシートコントロール
メルセデスベンツの調節可能なチャイルドシートコントロール
画像提供:Pixabay
LINはISO9141で定義された、単線ネットワークです。電気ウィンドウ,照明,ドアロック,キーカードエントリシステム,電動ミラー,パワーシートなどの低帯域幅のアプリケーションに使用されます。
DewesoftXのLINバスプラグインを使用すると、複数のLIN ネットワークに接続して通信を聞くことができます。VectorブランドのLINバスハードウェアを使用し、バス上のすべてのデータ送信を聞くリッスンオンリーのスレーブを模倣しています。デコードは次の3つの異なる形式で実行できます。
- 豊富なスケーリングオプションを持つアナログデータ
- 離散データ
- 両者の混在
このプラグインは、LINディスクリプションファイル(LDF)からの構成のインポートに対応しています。LINバスを読み込むには、Vector LINバスカードが必要です。
CANと他の車両バスの比較
| LIN | CAN | CAN FD | FlexRay | MOST | Ethernet | |
|---|---|---|---|---|---|---|
| スピード | 10~20kbps | 1Mbps | 8Mbps | 10Mbps | 150Mbps (共有) |
100 Mbps (ノードあたり) |
| データサイズ | 8B | 8B | 64B | 254B | 370B | 1500B |
| 配線 | 単線 | UTP* | UTP | UTP | UTP または光ファイバ | UT |
| トポロジ | バス | バス | バス/パッシブスター | バス/スター/混合 | リング | スター / ツリー / リング |
| 使用場所 | センサ,アクチュエータ(ライト,ミラーなど) | バックボーン,ボディ,シャシ,パワートレイン | ボディ,パワートレイン,分散制御,シャシ | 高性能パワートレイン,バックボーン,ドライブバイワイヤ,シャシ | 情報・エンタテイメントシステム | 診断,ECU プログラミング,情報 & エンタテイメント |
| エラー検出 | 8 ビット CRC |
15 ビット CRC | 17 ビット または 21 ビットの CRC |
24 ビット CRC |
CRC | 32 ビット CRC |
| 冗長性 | なし | なし | なし | あり | あり | なし |
| 決定論 | なし | なし | なし | あり | あり | 固有ではない |
| 価格 | $ | $$ | $$$ | $$$ | $$ | $$ |
あらゆるネットワークや相互運用システムと同様、車載バスはコストと予測される業界の要件やトレンドを考慮しつつ、アプリケーションの要件に応じて選択することが最適です。自動車メーカは、同等以上の導入コストで利用できる優れたバスがある以上、新しい設計に古いバスを実装したくありません。
DEWESoft CANバス DAQシステム
DEWESoftのシステムで標準またはオプションとして提供されるCANバスインタフェースは、高い機能を提供するだけでなく、追加のプロトコルへの拡張性も備えています。
 アナログ,デジタル,CANバスの車両データを収録するSIRIUS DAQモジュール
アナログ,デジタル,CANバスの車両データを収録するSIRIUS DAQモジュール
すべてのDEWESoft CANインタフェースはガルバニック絶縁されており、グランドループやその他の電気的障害から機器と接続されたデバイスを保護します。また、高速のCAN2.0b規格を利用しており、DewesoftはCAN FDデバイスも提供しています。
CANメッセージの読み取りと書き込みの両方ができるため、ネットワーク上のCANデバイスからデータを要求するためにバスにメッセージを送信できます。
付属のソフトウェアDewesoftXはDBCファイルをインポートできるため、すべてのDewesoft CANインタフェースを数秒で設定できます。DBCファイルは、名前,スケーリング,適切な工学単位などを使用してデータストリームを個々のチャネルに解析できるようにする標準的なフォーマットです。
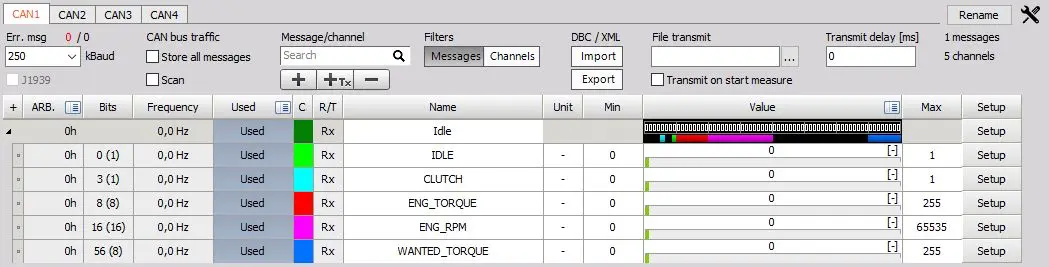 DewesoftX CANのメインセットアップ画面
DewesoftX CANのメインセットアップ画面
任意の行の右端にある「設定(Setup)」ボタンをクリックすると、以下のようなCANチャンネル設定画面が表示されます。
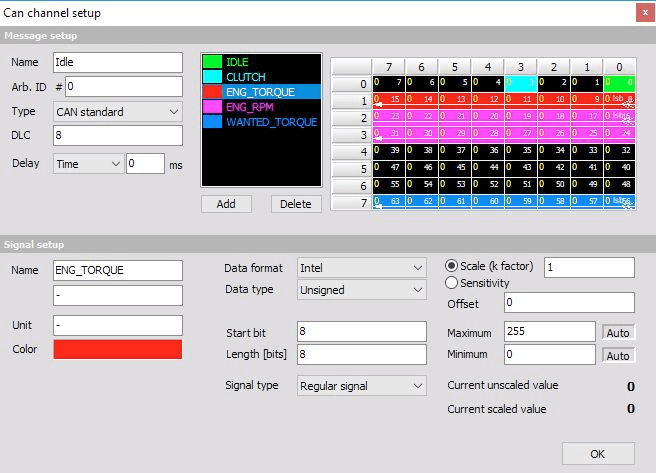 DewesoftX CAN バス チャネル設定画面。1 つのメッセージに含まれる 5 つの異なるチャネルを表示
DewesoftX CAN バス チャネル設定画面。1 つのメッセージに含まれる 5 つの異なるチャネルを表示
DewesoftXを使用すると、CANチャネルを簡単に構成できます。このソフトウェアは、CAN DBCファイルやXMLファイルのインポート/エクスポートが可能です。DBCファイルは、CANメッセージとチャネル定義のための一般的なファイルです。インポート後、ソフトウェアは自動的に利用可能なすべてのCANチャネルをセットアップし、CANメッセージをデコードします。
DewesoftX CANソフトウェア機能
- 高度なCAN の記録,保存,解析
- CANメッセージのオンラインモニタリングとデコード
- オフラインCANメッセージのデコード
- CANデータを表示するビジュアルディスプレイ
- CANチャネルのオンライン・オフラインの演算解析
- CAN DBC ファイルのインポートとエクスポート
- CAN,J1939,XCP/CCP での OBDII サポート
- CAN送信機能
Dewesoft CANバス インタフェース
DEWESoftはアナログデータ収録システムにCANバスインタフェースを実装した、最初のDAQシステムメーカの1つです。ほぼすべてのDewesoft DAQシステムは、少なくとも1つのCANバスインタフェースを標準で内蔵しており、完全な同期を保ちながら専用のCANインタフェースを内部,外部,またはその両方に追加することが可能です。
 DEWESoft CANバスインタフェース
DEWESoft CANバスインタフェース
関連ページ
2008年には標準機能として2つの高速CANバスインタフェースを備えた、DEWE-43が導入されました。 非常に重要なことは、これらのポートに入力されるCANデータは、アナログデータおよびカウンタ/デジタル入力データと完全にハードウェア的に同期していることです。また、Dewesoft CANインタフェースは電気的に絶縁されており、機器とバス自体をグランドループやその他の電気的問題から保護します。
 8つの多機能アナログ入力,8つのカウンタ/タイマ/デジタル入力,
8つの多機能アナログ入力,8つのカウンタ/タイマ/デジタル入力,
2つのアイソレーション,高速CANバスインタフェースを備えたDEWE-43A
DEWE-43は発売から1年足らずで、NASA TECH BRIEFS Reader's Choice Product of the Yearを受賞し、その革新的なDAQパワーと機能を非常に小さな機器に集約したことが評価されました。
現在DEWESoftは、車両バスデータの解析と検査のために、いくつかの標準的な自動車用インタフェースをサポートしています。対応するすべてのインタフェースからデータを取り込み、アナログ,ビデオなどの他のソースと同期できます。
関連ページ
CANインタフェースを内蔵したDewesoft DAQシステム
前述の通りほぼ全てのDEWESoft DAQシステムには、少なくとも1つのCANポートが標準で内蔵されており、下の表に従って標準でない場合は、全てのシステムにCANを装備することが可能です。
| 製品名 | CANポートは標準? | 追加のCANポートは? |
|---|---|---|
| DEWE-43A | はい 2つのCANポートを標準装備 | 外部* |
| MINITAURs | はい 1つのCANポートを標準装備 | 外部* |
| SIRIUSi XHS | はい 1つのCANポートを標準装備 | 外部* |
| SIRIUSシリーズ | はい 1つのCANポートを標準装備 | 外部* |
| SIRIUS-R8シリーズ | はい ラックスライスごとに1つのCANポートを標準装備 | 外部* |
| SIRIUS-MINI | いいえ | 外部* |
| SIRIUSwe (ウォータプルーフ) |
はい | 外部* |
| KRYPTON | いいえ 専用のKRYPTON CANモジュール | 外部* |
| IOLITE-Rシリーズ | いいえ | 外部* |
| IOLITEシリーズ | いいえ | 外部* |
DS-CAN2,SIRIUSim 4xCAN,SIRIUSf 8xCAN, KRYPTONi-1xCAN-FDが含まれます。
外部の同期可能なCANインタフェース
ほぼすべてのDEWESoft DAQシステムに内蔵されているCANポートに加え、個別に、同期可能な2,4,8ポートのCANインタフェースが利用可能です。これらは、DewesoftXが動作するWindowsコンピュータまたはDewesoft DAQシステムにUSBと同期ケーブルで接続します。
 左から: DS-CAN2,SIRIUSim 4xCAN,SIRIUSf 8xCAN
左から: DS-CAN2,SIRIUSim 4xCAN,SIRIUSf 8xCAN
これらのモジュールは、それぞれ 2,4,8つのCAN ポートを提供します。
関連ページ
KRYPTONi-1xCAN-FD モジュール
DEWESoftのCANバスシリーズの最新メンバーは、KRYPTONi-1xCAN-FDです。これはEtherCAT®経由で DAQシステムに接続するシングルポートCAN FDデバイスです。最大8Mbpsの高速CANデータレートをサポートします。さらにCAN FDは、CAN2.0 通信プロトコルだけでなく、J1939などの特殊なプロトコルもサポートしています。
 KRYPTONi 1xCAN-FD モジュールはわずか 62 x 56 x 29 mm
KRYPTONi 1xCAN-FD モジュールはわずか 62 x 56 x 29 mm
KRYPTONi-1xCAN-FDはガルバニック絶縁された通信ラインと、5Vと12Vの絶縁されたセンサ電源があります。セン電源の電力制限は1.4ワットです。
このモジュールはKRYPTON ONEシリーズなので、動作温度範囲が-40~85℃,IP67に準拠した防塵・防滴など厳しい環境下でも使用できます。
KRYPTONi-1xCAN-FDは、DSub9入力コネクタを備えたKRYPTON ONE標準シャーシで提供されます。
関連ページ